
Motores principales (transbordador espacial)
| Motores principales del transbordador espacial | ||
|---|---|---|
 Prueba de encendido. El área brillante en la parte inferior de la imagen es un disco mach | ||
| País de origen | Estados Unidos | |
| Primer vuelo | 18 de febrero de 1977, 12 de abril de 1981 (STS-1) | |
| Fabricante | Rocketdyne | |
| Usado en | Transbordador espacial | |
| Estado | Inactivo desde STS-135 | |
| Cohete de combustible líquido | ||
| Propergol | Hidrógeno líquido / Oxígeno líquido | |
| Proporción | 69:1[1] | |
| Ciclo | Combustión por fases | |
| Rendimiento | ||
| Empuje (vacío) | 2279 kN | |
| Empuje (nivel del mar) | 1859 kN | |
| Presión de la cámara | 2994 psi (20,64 MPa)[1] | |
| Impulso (vacío) | 452,3 segundos[1] | |
| Impulso (nivel del mar) | 366 segundos[1] | |
| Dimensiones | ||
| Longitud | 168 pulgadas (4,3 m) | |
| Diámetro | 96 pulgadas (2,4 m) | |
El Motor Principal del Transbordador Espacial o SSME (del inglés Space Shuttle Main Engine), también conocido como RS-25, es un motor cohete criogénico de propergoles líquidos que fue usado en el Transbordador Espacial de la NASA y está planificado que sea usado en su sucesor, el Sistema de Lanzamiento Espacial. Construido en Estados Unidos por la empresa Rocketdyne, el RS-25 quema los propelentes hidrógeno líquido y oxígeno líquido criogénicos, con cada motor produciendo 1859 kN de empuje en el momento del despegue. Aunque el RS-25 puede seguir su origen a la década de 1960, el desarrollo del motor se inició en la década de 1970, con el primer vuelo, el STS-1, ocurriendo el 12 de abril de 1981. El RS-25 ha sido sometido a varias mejoras durante su historia operacional para mejorar la confiabilidad, seguridad y carga de mantenimiento del motor.
El motor produce un impulso específico (Isp) de 452 segundos (4,43 km/s) en el vacío o 366 segundos (3,59 km/s) a nivel del mar, tiene una masa de aproximadamente 3,5 toneladas y es capaz de acelerar entre el 67% y el 109% de su nivel de potencia medido en incrementos de un 1%. El RS-25 opera con temperaturas que van entre los −253 °C (−423 °F) y los 3315 °C (5999,0 °F)[1]
En el Transbordador Espacial, el RS-25 fue usado en grupos de tres motores montados en la estructura trasera del Orbitador, con el combustible siendo obtenido desde el tanque externo. Los motores fueron usados para la propulsión durante el ascenso del transbordador, con empuje adicional siendo proporcionado por dos cohetes aceleradores de combustible sólido y los dos motores del Sistema de Maniobra Orbital AJ-10-190 del transbordador. Después de cada vuelo, los motores eran retirados del orbitador, inspeccionados y repasados antes de ser reutilizados en otra misión.
Componentes[editar]




El motor RS-25 consiste de varias bombas, válvulas y otros componentes que trabajan en conjunto para producir empuje. El combustible (hidrógeno líquido) y el oxidante (oxígeno líquido) provenientes desde el tanque externo del Transbordador Espacial entran al orbitador en las válvulas umbilicales de desconexión y desde allí pasan por las líneas de alimentación del sistema de propulsión principal del orbitador (en inglés: Main Propulsion System, MPS), mientras que en el Sistema de Lanzamiento Espacial (en inglés: Space Launch System, SLS), el combustible y oxidante de la etapa central del cohete fluirá directamente en las líneas del MPS. Una en las líneas del MPS, el combustible y el oxidante se separaran y siguen caminos separados a cada motor (tres en el Transbordador STS y hasta cinco en el Transbordador SLS). En cada una de las ramas, preválvulas permitirán que los propelentes entren al motor.[2][3]
Una vez en el motor, los propelentes pasan a través de turbobombas de baja presión para el combustible y el oxidante (en inglés: Low-Pressure Fuel Turbo Pumps, LPFTP; y Low-Pressure Oxidizer Turbo Pumps, LPOTP) y desde allí a las turbobombas de alta presión (en inglés: High-Pressure Fuel Turbo Pumps, HPFTP; y High-Pressure Oxidizer Turbo Pumps, HPOTP). Desde estas turbobombas de alta presión (en inglés: High-Pressure Turbo Pumps, HPTP) los propelentes toman diferentes rutas a través del motor. El oxidante es dividido en cuatro caminos separados: al intercambiador de calor del oxidante, que luego se divide en el presurizador del estanque de oxidante y los sistemas de supresión de pogo; a la turbobomba de baja presión del oxidante (en inglés: Low Pressure Oxidiser TurboPump, LPOTP); al prequemador de alta presión del oxidante, desde el cual es dividido hacia las turbinas de las HPFTP y las HPOTP antes de ser reunidos en el colector de gas caliente y enviados a la cámara de combustión principal (en inglés: Main Combustion Chamber, MCC); o directamente hacia los inyectores de la cámara de combustión principal.
Mientras tanto, el combustible fluye a través de la válvula principal de combustible hacia los sistemas de refrigeración regenerativa para la tobera y la MCC, o a través de la válvula de refrigeración de la cámara. El combustible que pasa a través del sistema de refrigeración de la MCC luego retrocede y pasa a través de la turbina de las LPFTP antes de ser enviado o al sistema de presurización de estanque de combustible o al sistema de refrigeración del múltiple de gas caliente (desde donde pasa por la MCC). El combustible en los sistemas válvulas de refrigeración de la tobera y de la cámara de combustión luego es enviado vía los prequemadores hacia la turbina de las HPFTP y de las HPOTP antes de ser reunido nuevamente en el múltiple de gas caliente, desde donde pasa hacia los inyectores de la MCC. Una vez en los inyectores, los propelentes son mezclados e inyectados en la cámara de combustión principal donde ellos son encendidos. La mezcla de propelente quemada es entonces expulsada a través de la garganta y la campana de la tobera del motor, la presión resultante es la que produce el empuje.[2]
Turbobombas[editar]
Sistema del oxidante[editar]
La Turbobomba de Baja Presión del Oxidante (en inglés: Low Pressure Oxidizer Turbopump, LPOTP) es una bomba de flujo axial impulsada por una turbina de seis etapas alimentada por oxígeno líquido y que funciona aproximadamente a 5.150 rpm. Aumenta la presión del oxígeno líquido desde 0,7 a 2,9 MPa (100 a 420 psi), con el flujo de la LPOTP siendo enviado a la turbobomba de alta presión del oxidante (en inglés: High-Pressure Oxidizer Turbopump, HPOTP). Durante la operación del motor, el aumento de la presión permite que la turbina de alta presión del oxidante opere a altas velocidades sin cavitar. La LPOTP, que mide aproximadamente 450 por 450 mm, está conectada a los ductos de propelente del vehículo y está instalada en una posición fija directamente encima de la estructura del vehículo de lanzamiento.[2]
La HPOTP consiste de dos bombas centrífugas de una sola etapa (una bomba principal y una bomba de prequemado) montadas en un eje común e impulsadas por una turbina de gas caliente de dos etapas. La bomba principal aumenta la presión del oxígeno líquido desde 2,9 a 30 MPa (420 a 4.350 psi) mientras que funciona a aproximadamente 28.120 rpm, entregando una potencia de salida de 23.260 hp. La HPOTP descarga el flujo separado en varias rutas, una de las cuales impulsa la turbina de la LPOTP. Otra ruta es hacia, y a través, de la válvula principal del oxidante e ingresa a la cámara principal de combustión. Otra pequeña ruta del flujo es sacada y enviada hacia el intercambiador de calor del oxidante. El oxígeno líquido fluye a través de una válvula de anti-inundación que impide que entre al intercambiador de calor hasta que este presente suficiente calor para que el intercambiador de calor utilice el calor contenido en los gases de la descarga de la turbina de la HPOTP, convirtiendo el oxígeno líquido a gas. El gas es enviado a un múltiple y luego encaminada para presurizar el estanque de oxígeno líquido. Otra ruta ingresa a la bomba de prequemado de dos etapas de la HPOTP para aumentar la presión del oxígeno líquido desde 30 a 51 MPa (4.300 psia a 7.400 psia). Pasa a través de la válvula del oxidante del prequemador de oxidante, y a través de la válvula del oxidante del prequemador de combustible hacia el prequemador de combustible. La HPOTP mide aproximadamente 600 por 900 mm (24 por 35 pulgadas). Está instalada al múltiple de gas caliente usando bridas.[2]
La turbina y las turbobombas de las HPOTP están montadas en un eje común. La mezcla de los gases calientes ricos en combustible en la sección de la turbina y el oxígeno líquido de la bomba principal puede crear un peligro y, para prevenir esto, las dos secciones están separadas por una cavidad que es continuamente purgada por el suministro de helio del motor durante la operación del motor. Dos sellos minimizan las fugas hacia la cavidad; un sello está localizado entre la sección de la turbina y la cavidad, mientras el otro está entre la sección de la bomba y la cavidad. La pérdida de presión de helio en esta cavidad resulta en una apagado automático del motor.[2]
Sistema de combustible[editar]
La turbobomba de baja presión del combustible (en inglés: Low-Pressure Fuel TurboPump, LPFTP) es una bomba de flujo axial impulsada por una turbina de dos etapas alimentada por hidrógeno gaseoso. Aumenta la presión del hidrógeno líquido desde 0,2 a 1,9 MPa (30 a 276 psia) y alimenta la turbobomba de alta presión del combustible (en inglés: High-Pressure Fuel Turbopump, HPFTP). Durante la operación del motor, el aumento de presión proporcionada por la LPFTP le permite a la HPFTP operar a altas velocidades sin cavitar. La LPFTP funciona a alrededor de 16.185 rpm, y tiene un tamaño de aproximadamente 450 por 600 mm. Está conectada a los ductos del propelente del vehículo y está instalada en una posición fija en la estructura del vehículo de lanzamiento.[2]
La HPFTP es una bomba centrífuga de tres etapas impulsada por una turbina de gas caliente de tres etapas. Aumenta la presión del hidrógeno líquido desde 1,9 a 45 MPa (276 a 6.515 psia) y funciona a aproximadamente 35.360 rpm con una potencia de 71.140 hp. El flujo de descarga de la turbobomba es enviada a, y a través, de la válvula principal y luego es separada en tres rutas. Una ruta es a través de la camisa de la cámara principal de combustión, donde el hidrógeno es usado para enfriar las paredes de la cámara. Luego es enviada desde la cámara principal de combustión hacia la LPFTP, donde es usado para impulsar la turbina LPFTP. Luego una pequeña porción del flujo de la LPFTP es dirigida al múltiple común de los tres motores para formar una sola ruta al estanque de hidrógeno líquido para mantener la presurización. El hidrógeno restante pasa entre las paredes internas y externas del múltiple de gas caliente para enfriarlo y luego es descargado en la cámara principal de combustión. Una segunda ruta del flujo de hidrógeno desde la válvula principal de combustible es a través de la tobera del motor (para enfriar la tobera). Luego se une a la tercera ruta del flujo desde la válvula de la cámara del refrigerante. Luego este flujo combinado es dirigido a los prequemadores de combustible y de oxidante. La HPFTP tiene un tamaño aproximado de 550 por 1100 mm y está instalada en el múltiple de gas caliente usando bridas.[2]
Cabezal de potencia[editar]
Prequemadores[editar]

Los prequemadores del oxidante y del combustible están soldados al múltiple de gas caliente. El combustible y el oxidante ingresan a los prequemadores y son mezclados de tal forma que pueda ocurrir una combustión eficiente. La chispa aumentada del encendido es una pequeña cámara de combinación localizada en el centro del inyector de cada uno de los prequemadores. Los dos encendedores de chispa de doble redundancia, que son activados por el controlador del motor, son usados durante la secuencia de partida del motor para iniciar la combustión en cada uno de los prequemadores. Ellos son apagados después de aproximadamente tres segundos debido a que luego el proceso de combustión es autosostenible. Los prequemadores producen los gases calientes ricos en combustible que pasan a través de las turbinas para generar la potencia necesaria para operar las turbobombas de alta presión. El flujo de salida de los prequemadores del oxidante impulsan una turbina que está conectada a la HPOTP y a la bomba del prequemador del oxidante. El flujo de salida del prequemador del combustible impulsa una turbina que está conectada a la HPFTP.[2]
La velocidad de las turbinas de las HPOTP y HPFTP depende de la posición de las correspondientes válvulas del oxidante de los prequemadores de oxidante y de combustible. Estas válvulas son posicionadas por el controlador del motor, que las usa para acelerar el flujo del oxígeno líquido hacia los prequemadores y, así, controlar el empuje del motor. La válvulas de oxidante del prequemador de oxidante y de combustible aumentan o disminuyen el flujo del oxígeno líquido y, así, aumenta o disminuyen la presión de la cámara del prequemador, la velocidad de las turbinas HPOTP y HPFTP, y del flujo de oxígeno líquido y del hidrógeno gaseoso hacia la cámara principal de combustión, lo que aumenta o disminuye el empuje del motor. La válvulas del prequemador del oxidante y del combustible operan en forma conjunta para acelerar el motor y mantener una proporción de mezcla de propelente constante a 6,03:1.[4]
Las válvulas principales de oxidante y de combustible controlan el flujo del oxígeno líquido y del hidrógeno líquido hacia el motor y son controladas por el controlador de cada uno de los motores. Cuando un motor está funcionando, las válvulas principales están completamente abiertas.[2]
Cámara principal de combustión[editar]
Las cámaras principales de combustión de cada uno de los motores (en inglés: Main Combustion Chamber, MCC) recibe gas caliente rico en combustible desde un múltiple de gas caliente del circuito de refrigeración. El hidrógeno gaseoso y el oxígeno líquido entran a la cámara en el inyector, que mezcla los propelentes. Una pequeña cámara de ignición de chispa aumentada está localizada en el centro del inyector y este encendedor de doble redundancia es usado durante la secuencia de encendido del motor para iniciar la combustión. Los encendedores son apagados después de aproximadamente tres segundos debido a que el proceso de combustión se autosostiene. El inyector principal y la estructura del domo están soldados al múltiple de gas caliente y la MCC también está apernada al múltiple de gas caliente.[2] La MCC comprende una cubierta estructural fabricada de Inconel 718 que está cubierta con una aleación de cobre-plata-circonio llamada NARloy-Z, desarrollada específicamente para el RS-25 en la década de 1970. Aproximadamente 390 canales están mecanizados en la pared de la camisa para llevar hidrógeno líquido a través de la camisa para refrigerar la MCC, ya que la temperatura en la cámara de combustión alcanza 3315 °C (5999,0 °F) durante el vuelo - esto es mucho más alto que el punto de ebullición del hierro.[5][6]
Tobera[editar]

La tobera del motor tiene 121 plg (307,3 cm) de largo con un diámetro de 10,3 plg (26,2 cm) en su garganta y 90,7 plg (230,4 cm) en su salida.[7] La tobera es una extensión en forma de campana apernada a la cámara principal de combustión, conocida como una tobera de Laval. La tobera del RS-25 tiene una inusualmente grande proporción de expansión (aproximadamente 77,5:1) para la cámara de presión.[8] A nivel de mar, una tobera de esta proporción normalmente produciría una separación del flujo del chorro de la tobera, lo que causaría dificultades de control y que incluso podría causar daños mecánicos al vehículo. Sin embargo, para ayudar a la operación del motor los ingenieros de Rocketdyne variaron el ángulo de las paredes de la tobera, reduciéndola cerca de la salida. Esto eleva la presión justo alrededor del borde a entre 4,6 y 5,7 psi (32 y 39 kPa) y que previene la separación de flujo. La parte interior del flujo está a una presión mucho más baja, alrededor de 2 psi (14 kPa) o menos.[9] La superficie interna de cada tobera es refrigerada por el flujo de hidrógeno líquido a través de pasajes refrigerantes de tubos de acero inoxidables soldados en la pared. En el Transbordador Espacial, un anillo de soporte soldado al extremo delantero de la tobera era el punto de unión del motor al escudo térmico proporcionado por el orbitador. La protección termal era necesaria debido a la exposición que experimentan porciones de las toberas durante las fases del lanzamiento, ascensión, puesta en órbita y reentrada de una misión. La aislación consiste de cuatro capas de napa metálica cubierta con una lámina y pantalla metálica.[2]
Controlador[editar]

Cada motor está equipado con un Controlador Principal de Motor (en inglés: Main Engine Controller, MEC), un computador integrado que controla todas las funciones del motor (a través del uso de válvulas) y monitorea su desempeño. Construido por Honeywell Aerospace, originalmente cada MEC estaba compuesto de dos computadores Honeywell HDC-601 redundantes,[10] posteriormente mejorado a un sistema compuesto de dos procesadores doblemente redundantes Motorola 68000 (M68000) (para un total de 4 M68000 por controlador).[11] La instalación del controlador directamente en el mismo motor simplificó enormemente el cableado entre el motor y el vehículo de lanzamiento, debido a que todos los sensores y actuadores están conectados directamente al único controlador, luego cada MEC es conectado a los Computadores de Propósito General (en inglés: General Purpose Computers, GPC) del orbitador o conjunto de aviónica del SLS a través de su propia Unidad de Interfase con el Motor (en inglés: Engine Interface Unit, EIU).[12] Al usar un sistema dedicado también se simplifica el software y de esta forma se mejora su confiabilidad.
Dos computadores independientes de doble CPU, A y B, forman el controlador; dándole redundancia al sistema. La falla del sistema controlador A automáticamente provoca un cambio al sistema controlador B sin impedir las capacidades operacionales; la subsecuente falla del sistema controlador B provocaría un apagado paulatino del motor. Al interior de cada sistema (A y B), los dos M68000 operan en modo "unísono", por lo tanto permitiendo que cada sistema detecta fallas al comparar sus niveles de señales en los buses de los dos procesadores M68000 al interior de ese sistema. Su las diferencias son encontrados entre los dos buses, se genera una interrupción y el control es pasado al otro sistema. Debido a las sutiles diferencias entre los M68000 de Motorola y el fabricante de segunda fuente TRW, cada sistema utiliza M68000 del mismo fabricante (eso quiere decir que el sistema A tendrá dos CPU de Motorola mientras que el sistema B usará dos CPU fabricadas por TRW). La memoria para los controladores del Bloque I eran del tipo cable bañado, que funciona de manera similar a la memoria del núcleo magnético y que retiene los datos incluso después de que se corta el suministro de energía.[13] Los controladores del Bloque II usaban RAM CMOS estática convencional.[11]
Los controladores estaban diseñados para ser lo suficientemente robustos para sobrevivir a las fuerzas del lanzamiento y probaron ser extremadamente resistentes al daño. Durante la investigación del accidente del Challenger los dos MEC (de los motores 2020 y 2021), recuperadas desde el fondo marino, fueron entregadas a Honeywell Aerospace para su examen y análisis. Un controlador estaba abierto en un lado y ambos estaban severamente corroídos y dañados por la vida marina. Ambas unidades fueron desensambladas y las unidades de memoria lavadas con agua deionizada. Después fueron secadas y calentadas al vacío, los datos de estas unidades fueron recuperados para ser sometidas a un análisis forense.[14]
Válvulas principales[editar]
Par controlar la salida del motor, el MEC opera cinco válvulas de propelente actuadas hidráulicamente en cada motor; las válvulas del prequemador del oxidante, del prequemador del combustible, de la principal del oxidante, de la principal del combustible, y de la cámara de refrigeración. En una emergencia, las válvulas pueden ser cerradas completamente usando el sistema de abastecimiento de helio del motor como un sistema de actuación de respaldo.[2]
En el Transbordador Espacial las válvulas principales del oxidante y de purga de combustible eran usadas después del apagado para botar cualquier residuo de propelente, con el oxígeno líquido residual siendo ventilado a través del motor y del hidrógeno residual siendo ventilado a través de las válvulas de llenado y drenado de hidrógeno líquido. Después de que la purga estaba completa, las válvulas se cerraban y permanecían cerradas por el resto de la misión.[2]
Una válvula de control de refrigerante está montada en el ducto de pasada de refrigerante de la cámara de combustión de cada motor. El controlador del motor regula la cantidad de hidrógeno gaseoso que se permite pasar a la ciclo de refrigeración de la tobera, controlando de esta forma su temperatura. La válvula de refrigeración de la cámara está 100% abierta antes de que el motor se encienda. Durante la operación del motor, está abierta al 100% cuando la aceleración está entre 100% y 109% para maximizar la refrigeración. Para las aceleraciones entre 65% y 100%, su posición va entre 66,4% y 100% para una refrigeración reducida.[2]
Suspensión cardán[editar]
| Video externo | ||
|---|---|---|
|
| ||
Atención: este archivo está alojado en un sitio externo, fuera del control de la Fundación Wikimedia. |
Cada motor está instalado con un suspensión cardán de rodamientos, una rótula universal que está apernada al vehículo de lanzamiento por su brida superior y al motor por su brida inferior. Representa la interfase de empuje entre el motor y el vehículo de lanzamiento, apoyando los 7480 lb (3393 kg) del peso del motor y resistiendo más de 500 000 lb (226 796 kg) de empuje. Así como proporcionando los medios de sujetar el motor al vehículo de lanzamiento, la suspensión cardán de rodamientos permite que el motor sea girado o inclinado en relación con dos ejes de libertad con un rango de ±10,5°.[15] Este movimiento permite que el vector de empuje del motor pueda ser alterado, y de esta forma dirigir al vehículo hacia una orientación correcta. El conjunto de rodamientos es de aproximadamente 290 por 360 mm, tiene una masa de 105 lb (48 kg) y está fabricado de una aleación de titanio.[16]
Las turbobombas de baja presión de oxígeno y de baja presión de combustible estaban montadas con 180° de separación en la parte trasera de la estructura de empuje del fuselaje del orbitador. Las tuberías desde las turbobombas de baja presión a las turbobombas de alta presión contenían fuelles flexibles que permitían que las turbobombas de baja presión permanecieran estacionarias mientras que el resto del motor era inclinado para ejercer control vectorial del empuje, y también para prevenir el daño a los bombas cuando se aplicaban cargas sobre ellas. La tubería del hidrógeno líquido desde las LPFTP a las HPFTP estaba aislada para impedir la formación de aire líquido.[2]
Sistema de helio[editar]
En adición a los sistemas de combustible y oxidante, el Sistema Principal de Propulsión (en inglés: Main Propulsion System, MPS) del vehículo de lanzamiento también está equipado con un sistema de helio consistente de 10 estanques de almacenamiento además de varios reguladores, válvulas de comprobación, tuberías de distribución y válvulas de control. El sistema es usado durante el vuelo para purgar el motor y proporcionar presión para las válvulas de actuación del motor dentro del sistema de administración del propelente y durante apagados de emergencia. Durante la reentrada, en el Transbordador Espacial, cualquier resto de helio era usado para purgar a los motores durante la reentrada y para presurización.[2]
Historia[editar]
Desarrollo[editar]
La historia del RS-25 se inicia en la década de 1960 cuando el Centro Marshall de vuelos espaciales de la NASA y Rocketdyne estaban realizando una serie de estudios sobre motores de alta presión, desarrollados a partir del exitoso motor J-2 usado en las etapas superiores S-II y S-IVB del cohete Saturno V durante el Programa Apolo. Los estudios fueron realizados dentro de un programa para mejorar los motores del Saturno V, que produjeron un diseño para un motor de etapa superior de 350.000 lbf conocida como HG-3.[17] A medida que los niveles de financiamiento para Apolo disminuían el HG-3 fue cancelado así como el reemplazo para el motor F-1, el M-1 (el desarrollo para el cual fue finalizado en el año 1968).[18] Fue el diseño para el HG-3 que formaría la base para el RS-25.[19]
Mientras tanto, en el año 1967, la Fuerza Aérea de Estados Unidos financió un estudio para sistemas avanzados de propulsión de cohetes para ser usado durante el Proyecto Isinglass, cuando a Rocketdyne le solicitó investigar los motores aerospike y a Pratt & Whitney (P&W) para investigar motores convencionales más eficientes del tipo con toberas de Laval. A la conclusión del estudio, P&W sugirió una propuesta para un motor de 250.000 lbf denominado como XLR-129, que utilizaba un tobera expansiva de dos posiciones para entregar una eficiencia mayor en un amplio rango de altitudes.[20][21]
En enero de 1969 la NASA otorgó contratos a General Dynamics, Lockheed, McDonnell Douglas y North American Rockwell para el desarrollo inicial del Transbordador Espacial.[22] Como parte de estos estudios de la 'Fase A', las empresas involucradas seleccionaron una versión mejorada del XLR-129, desarrollando 415.000 lbf, como el motor de línea de base para sus diseños.[20] Este diseño puede ser encontrado en muchas de las versiones de transbordadores planificadas hasta la misma decisión final. Sin embargo, la NASA estaba interesada en empujar el lo más avanzado de la tecnología en todas las formas, por lo que decidieron seleccionar un diseño mucho más avanzado con el propósito de "forzar un avance de la tecnología de los motores de cohete".[8][20] Ellos solicitaron un nuevo diseño basado en una cámara de combustión de alta presión funcionando alrededor de 3000 psi, lo que aumentaba las capacidades del motor.
El desarrollo comenzó en el año 1970. cuando la NASA publicó una solicitud para propuestas para los estudios conceptuales de la 'Fase B' del motor principal, requiriendo el desarrollo de un motor acelerable, de combustión escalonada del tipo de Laval.[8][20] La solicitud estaba basada en el entonces diseño actual del Transbordador Espacial que presentaba dos etapas reutilizables, el orbitador y un impulsor de retorno de vuelo controlado tripulado, y que requería un motor que fuera capaz de impulsar ambos vehículos con dos diferentes toberas (12 motores impulsores con 550.000 lbf de empuje a nivel del mar cada uno y 3 motores para el orbitador con 632.000 lbf de empuje en el vacío cada uno).[8] Rocketdyne, P&W y Aerojet General fueron seleccionados para recibir financiamiento aunque, dado que P&W ya tenía desarrollo avanzado (habiendo demostrado en funcionamiento un concepto de motor con 350.000 lbf de empuje) y la experiencia previa de Aerojet General en el desarrollo del motor M-1 con 1.500.000 lbf de empuje, Rocketdyne fue forzado a invertir una gran cantidad de dinero de fondos privados en el proceso de diseño para permitirle a la compañía alcanzar a sus competidores.[20]
Para el momento en que el contrato fue adjudicado, las presiones presupuestarias resultaron en que el diseño del transbordador habían cambiado a la forma final de la configuración que terminó siendo el orbitador, el estanque externo y los dos impulsores, y de esa forma solo fue requerido que el motor impulsara al orbitador durante el ascenso.[8] Durante el periodo de estudio de la 'Fase B' que duró un año, en Rocketdyne fueron capaces de usar su experiencia desarrollando el motor HG-3 para diseñar su propuesta para el SSME, produciendo un prototipo para enero del año 1971. El motor hacia uso de una nueva aleación de cobre-circonio desarrollada por Rocketdyne (llamada NARloy-Z) y que fue probada el 12 de febrero de 1971, produciendo una presión de cámara de 3172 psi. Las tres compañías participantes enviaron sus propuestas de desarrollo de motor en abril de 1971, con Rocketdyne ganando el contrato el 13 de julio de 1971 - aunque el trabajo del desarrollo del motor no comenzaría hasta el 31 de marzo de 1972, debido a una impugnación legal realizada por P&W.[8][20]
Después de la adjudicación del contrato, se llevó a cabo una Revisión Preliminar del Diseño (en inglés: Preliminary Design Review, PDR) en septiembre de 1972, seguida por una Revisión Crítica del Diseño (en inglés: Critical Design Review, CDR) en septiembre de 1976 después de las cuales el diseño del motor fue congelado y se inició la construcción del primer conjunto de motores capaces de volar. La revisión final de todos los componentes del Transbordador Espacial, incluyendo los motores, fue realizada en el año 1979. Las revisiones del diseño operaban en paralelo con varios hitos de pruebas, las pruebas iniciales que involucraron componentes individuales de los motores identificaron desperfectos en varias áreas del diseño, incluyendo las HPFTP, HPOTP, válvulas, toberas y prequemadores de combustible. Las pruebas de componentes individuales del motor fueron seguidas por la primera prueba de un motor completo (en 0002) el 16 de marzo de 1977. La NASA especificó que, previo al primer vuelo del Transbordador, los motores tenían que haber sido sometido al menos a 65.000 segundos de pruebas, un hito que fue alcanzado el 23 de marzo de 1980, con el motor habiendo sido sometido a 110.253 segundos de pruebas para la fecha de ejecución del STS-1 tanto en puestos de pruebas en el Centro Espacial Stennis como instalados en la Instalación de Pruebas de la Propulsión Principal (en inglés: Main Propulsion Test Article, MPTA). El primer conjunto de motores (2005, 2006 y 2007) fueron entregados al Centro Espacial Kennedy en el año 1979 y fueron instalados en el Columbia, antes de ser removidos en el año 1980 para más pruebas y reinstalados en el orbitador. Los motores, que estaban en la configuración del Primer Vuelo Orbital Tripulado (en inglés: First Manned Orbital Flight, FMOF) y certificados para operar al 100% del Nivel de Potencia Nominal (en inglés: Rated Power Level, RPL), fueron hechos funcionar en un Disparo de Alistamiento de Vuelo de veinte segundos el 20 de febrero de 1981, y después de la inspección fueron declarados listos para el vuelo.[8]
Programa del Transbordador Espacial[editar]

Cada Transbordador Espacial tenía tres motores RS-25, instalados en la estructura trasera del orbitador en la Instalación de Procesamiento del Orbitador previo a que el orbitador fuera transferido al Edificio de Ensamble de Vehículos. Si era necesario los motores podían ser cambiados en el sitio de lanzamiento. Los motores, se alimentaban de propelente desde el estanque externo (en inglés: External Tank, ET) del Transbordador Espacial a través del Sistema Principal de Propulsión (en inglés: Main Propulsion System, MPS) del orbitador, eran encendidos a T-6,6 segundos antes del despegue (con cada ignición escalonada y desplazada en 120 ms[23]), lo que permitía que su desempeño fuera comprobado previo a la ignición de los Impulsores Cohete de Combustible Sólido del Transbordador Espacial (en inglés: Space Shuttle Solid Rocket Booster, SRB), los que obligaban a ejecutar el lanzamiento.[24] Al momento del lanzamiento, los motores estarían operando a un 100% RPL, acelerando hasta 104,5% inmediatamente después del despegue. Los motores mantendrían este nivel de potencia hasta alrededor de los T+40 segundos, momento en el cual su potencia se bajaría a aproximadamente un 70% para reducir las cargas sobre el vehículo cuando este pasaba a través de la barrera del sonido (y en el caso del transbordador propiamente tal el punto de máxima presión dinámica o Max-Q).[nota 1][20][23] Luego los motores serían desacelerados hasta aproximadamente T+8 minutos, momento en el cual serían gradualmente bajados a 65% para impedir que el vehículo excediera los 3 g de aceleración ya que se aligeraba progresivamente debido al consumo de propelente. Luego los motores eran apagados, un procedimiento conocido como Apagado del Motor Principal (en inglés: Main Engine Cutoff, MECO), aproximadamente a T+8,5 minutos.[20] Cualquier resto de propelente que quedara en el ET sería expulsado a través de las toberas del motor.
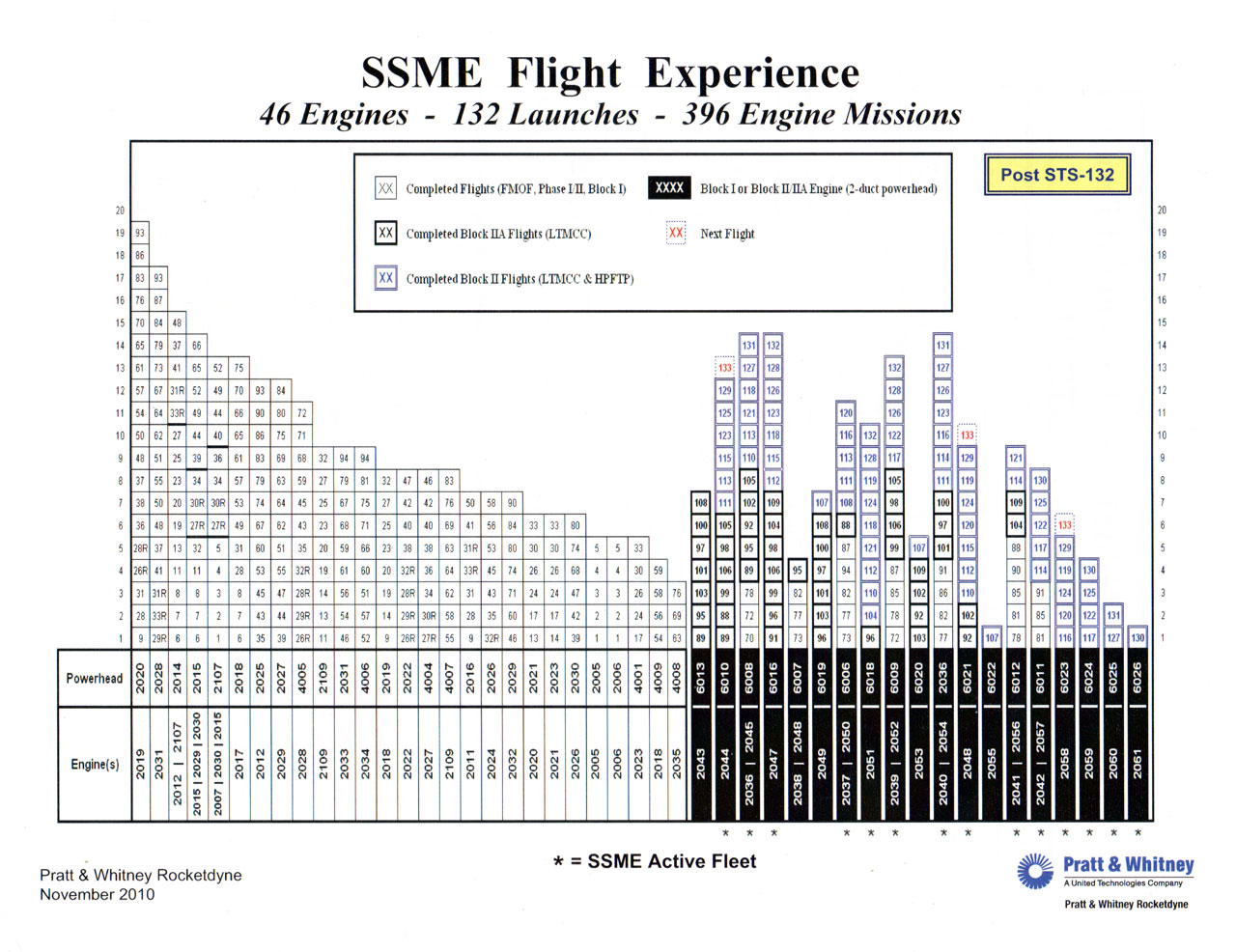
Después de cada vuelo los motores serían sacados del orbitador y transferidos a las Instalaciones de Procesamiento del Motor Principal del Transbordador Espacial (en inglés: Space Shuttle Main Engine Processing Facility, SSMEPF), donde ellos serían inspeccionados y preparados para ser reutilizados en un vuelo subsecuente.[25] Un total de 46 motores RS-25 reutilizables, cada uno costando alrededor de US$40 millones, fueron volados durante el programa del Transbordador Espacial, con cada uno de los nuevos motores o de los repasados entrando al inventario de vuelo requiriendo una calificación de vuelo en uno de los puestos de prueba ubicados en el Centro Espacial Stennis previo a su uso en un vuelo.[23][26][27]
Mejoras[editar]

Durante el desarrollo del programa del Transbordador Espacial, el RS-25 pasó a través de una serie de mejoras, incluyendo cambios a la cámara de combustión, mejores soldaduras y cambios a las turbobombas en un esfuerzo para mejorar el desempeño y la confiabilidad del motor y de esta forma reducir la cantidad de mantenimiento requerido después de ser usados. Como un resultado, varias versiones del RS-25 fueron usadas durante el programa:[6][20][22][23][28][29][30][31][32]
- FMOF (First Manned Orbital Flight, en castellano: Primer Vuelo Orbital Tripulado) – Certificado para un 100% de Nivel de Potencia Nominal (en inglés: Rated Power Level, RPL). Usado para las misiones de Pruebas de Vuelos Orbitales STS-1—STS-5 (motores 2005, 2006 y 2007).
- Fase I – Usados para las misiones STS-6—STS-51-L, el motor de la Fase I ofreció una vida de servicio alargada y estaba certificado para un 104% de RPL.
- Fase II (RS-25A) – Volado por primera vez en la misión STS-26, el motor de la Fase II ofrecía varias mejoras de seguridad y estaba certificado para un 104% de RPL y un 109% de Nivel de Potencia Total (en inglés: Full Power Level, FPL) en el caso de alguna contingencia.
- Block I (RS-25B) – Volado por primera vez en la misión STS-70, los motores del Block I ofrecieron turbobombas mejoradas con rodamientos de cerámica, la mitad de las partes giratorias y un nuevo proceso de vaciado que reducía la cantidad de soldaduras. Las mejoras del Block I también incluían un nuevo cabezal de potencia de dos ductos (a diferencia del diseño original que tenía tres ductos conectados a la HPFTP y dos a la HPOTP), lo que mejoró el flujo de gas caliente y un mejorado intercambiador de calor del motor.
- Block IA (RS-25B) – Volado por primera vez en la misión STS-73, el motor del Block IA ofreció mejoras en el inyector principal.
- Block IIA (RS-25C) – Volado por primera vez en la misión STS-89, el motor del Block IIA era un modelo interino usado mientras ciertos componentes del motor del Block II completaban su desarrollo. Los cambios incluían una nueva Garganta Grande para la Cámara de Combustión (lo que había sido recomendado originalmente por Rocketdyne en el año 1980), turbombas de baja presión mejoradas y certificación para un 104,5% de RPL para compensar por una reducción de 2 segundos (0,020 km/s) en el impulso específico (los planes originales requerían que el motor fuera certificado para un 106% debido a cargas más pesadas para la Estación Espacial Internacional, pero no esto no fue requerido y hubiera reducido la vida de servicio del motor). Una versión ligeramente modificada voló por primera vez en la misión STS-96.
- Block II (RS-25D) – Volado por primera vez en la misión STS-104, la mejora del Block II incluía todas las mejoras del Block IIA más una nueva turbobomab de alta presión del combustible. Este modelo fue probado en tierra a un 111% de FPL en el caso de una contingencia de aborto y certificados a un 109% de FPL para ser usado durante un aborto intacto.
Los efectos más obvios de las mejoras recibidas por el RS-25 durante el programa del Transbordador Espacial fueron aumentos en la aceleración del motor. Mientras que el motor FMOF tenían una salida máxima de un 100% de RPL, los motores del Block II podían acelerar a tanto como un 109% o un 111% en una emergencia, siendo el desempeño usual de un 104,5%. Estos incrementos en aceleración hacían una significativa diferencia en el empuje producido por el motor:[16][23]
| Nivel del mar | Vacío | |
|---|---|---|
| 100% de empuje | 1670 kN | 2090 kN |
| 104,5% de empuje | 1750 kN | 2170 kN |
| 109% de empuje | 1860 kN | 2280 kN |
Especificar niveles de potencia de más del 100% puede parecer absurdo, pero existe una lógica detrás de esto. El nivel de un 100% no significa que sea el nivel de potencia máximo físicamente obtenible, es más bien una especificación decidida durante el desarrollo del motor -el nivel de potencia nominal esperado. Cuando estudios posteriores indicaron que el motor podía operar en forma segura a niveles por sobre el 100%, estos niveles más altos se convirtieron en estándares. Al mantener la relación original de nivel de potencia versus empuje físico ayuda a reducir la confusión, ya que crea una relación fija sin variación de tal forma que los datos de prueba (o los datos operacionales de misiones pasadas y futuras) puedan ser fácilmente comparados. Si el nivel de potencia fuera aumentado y a ese nuevo valor se le asignara el 100%, entonces todos los datos y documentación previos necesitarían ser cambiados o comprobados contra ese empuje físico correspondiente al 100% del nivel de potencia a esa fecha.[8] El nivel de potencia del motor afecta a la confiabilidad del motor, habiendo estudios que indican que la probabilidad de falla de un motor aumentan rápidamente con niveles de potencia de más del 104,5%, lo que explica de porque los niveles por sobre los 104,5% fueron reservados solo para ser usados en caso de contingencia.[28]
Incidentes[editar]
Durante el curso del programa del Transbordador Espacial, fueron usados un total de 46 motores RS-25 (con un RS-25D extra construido pero nunca utilizado). Durante las 135 misiones, para un total de 405 'misiones de motor' individuales,[26] Pratt & Whitney Rocketdyne informó una tasa de confiabilidad del 99,95%, con solo una falla del SSME en vuelo que ocurrió con el transbordador espacial Challenger durante la misión STS-51-F.[4] Sin embargo, los motores sufrieron una variedad de fallas en el sitio de lanzamiento (abortos del Conjunto de Secuencia de Lanzamiento Redundantes o en inglés: Redundant Set Launch Sequencer, RSLS) y otros problemas durante el curso del programa:
- STS-41-D (Discovery) – El motor No. 3 causó un apagado RSLS a los T-4 segundos debido a una pérdida del control redundante en la válvula del motor principal, el vehículo completo fue devuelto y el motor fue reemplazado.[33]
- STS-51-F (Challenger) – El motor No. 2 causó un apagado RSLS a los T-3 segundos debido a una válvula del refrigerante con un mal funcionamiento.[34][35]
- STS-51-F (Challenger) – El motor No. 1 (2023) se apagó a los T+5:43 debido a sensores de temperatura defectuosos, llevando a un Aborto a la Órbita (en inglés: Abort to Orbit, ATO) (aunque los objetivos y la duración de la misión no fueron comprometidos por el ATO.[23][35]
- STS-55 (Columbia) – El motor No. 3 causó un apagado RSLS a los T-3 segundos debido a una fuga en su válvula de comprobación del prequemador de oxígeno líquido.[36]
- STS-51 (Discovery) – El motor No. 2 causó un apagado RSLS a los T-3 segundos debido a un sensor de combustible de hidrógeno defectuoso.[37]
- STS-68 (Endeavour) – El motor No. 3 (2032) provocó un apagado RSLS a los T-1,9 segundos cuando un sensor de temperatura en su HPOTP excedió su límite.[38]
- STS-93 (Columbia) – A los T+5 segundos, un cortocircuito eléctrico desconectó a un controlador primario y a uno secundario en dos de los tres motores. Adicionalmente, un clavija de 0,1 pulgadas de diámetro y de 1 pulgada de largo bañado en oro, utilizado para tapar un orificio en el puesto del oxidante, se soltó al interior del inyector principal del motor e impactó en la superficie interna de la tobera del motor, rompiendo una tubería de refrigeración de hidrógeno. Las tres rupturas resultantes en la tubería causaron una fuga que provocó un apagado prematuro del motor al aumentar el consumo de propelente.[39]
Después del Transbordador[editar]

Programa Constelación[editar]
Durante el periodo precedente al final del retiro del Transbordador Espacial, se propusieron varios planes para los motores restantes, que iban desde ser todos mantenidos en posesión de la NASA, a todos ellos siendo regalados (o vendidos por entre US$400.000 y US$800.000 cada uno) a varias instituciones tales como museos y universidades.[40] Esta política siguió los cambios a las configuraciones planeadas de los cohetes del vehículo de lanzamiento-carga Ares V y del vehículo lanzamiento-tripulación Ares I del programa Constelación, que había sido planificado que usaran el RS-25 en sus primeras y segundas etapas respectivamente.[41] Mientras que estas configuraciones inicialmente habían parecido que valían la pena, ya que ellas usarían la actual tecnología de ese entonces después del retiro del Transbordador en el año 2010, pero el plan tenía varias desventajas:[41]
- Los motores no serían reutilizables, ya que ellos estarían permanente instalados a las etapas descartadas.
- Cada motor tendría que someterse a un disparo de pruebas previo a la instalación y lanzamiento, con la necesidad de un reacondicionamiento después de la prueba.
- Sería caro, consumidor de tiempo e intensivo en peso convertir el RS-25D de encendido en tierra a una versión de encendido en el aire para la segunda etapa del Ares I.
Después de varios cambios de diseño a los cohetes Ares I y Ares V, el RS-25 fue reemplazado con un solo motor J-2X para la segunda etapa del Ares I y seis motores modificados RS-68 (que estaba basado tanto en el SSME y el motor J-2 de la era del programa Apolo) en la etapa central del Ares V; esto significaba que el RS-25 sería retirado junto con la flota del Transbordador Espacial.[41] Sin embargo, en el año 2010 a la NASA se le ordenó detener el programa Constelación, y con eso el desarrollo de tanto el Ares I como el Ares V, y que en vez que se enfocara en la construcción de un nuevo lanzador pesado.[42]
Sistema de Lanzamiento Espacial[editar]

En el Sistema de Lanzamiento Espacial (en inglés: Space Launch System, SLS), se planificaron nuevas versiones desechables de los motores una vez que el inventario inicial de motores (SSME) del programa del Transbordador Espacial fueran usados, el desarrollo de versiones desechables más baratas del motor tiene una larga historia, la más destacada es la propuesta en la década de 1990 del Sistema Nacional de Lanzamientos (en inglés: National Launch System, NLS).[43][44] El RS-25 desechable del SLS, en agrupaciones de tres, cuatro o cinco, está siendo estudiado, cada uno alimentándose de propelente desde la etapa central del cohete. Ellos proporcionan la propulsión durante la primera etapa del vuelo del SLS, con el empuje adicional siendo provisto por dos impulsores. En las siguientes etapas, los motores son descartados junto con el resto de la etapa central.
Después del retiro del Transbordador Espacial, la NASA anunció el 14 de septiembre de 2011, que comenzaría a desarrollar un nuevo vehículo de lanzamiento, conocido como el Sistema Espacial de Lanzamiento (en inglés: Space Launch System, SLS), para reemplazar a la flota de transbordadores.[45] El diseño de las características del RS-25 para el SLS en su etapa central, con diferentes versiones del cohete siendo instaladas con entre tres y cinco motores.[46][47] Los vuelos iniciales del nuevo vehículo de lanzamiento harán uso de los motores RS-25D Block II ya volados, con la NASA manteniendo los restantes motores en un ambiente "seguro purgados" en el Centro Espacial Stennis, "junto con todos los sistemas terrestres requeridos para mantenerlos".[48][49] Además de los RS-25D, el programa SLS usará los Sistemas Principales de Propulsión (en inglés: Main Propulsion Systems, MPS) de los tres orbitadores restantes para propósitos de pruebas (actualmente están siendo retirados como parte del proceso de desactivación de los orbitadores), con los dos primeros lanzamientos (SLS-1 y SLS-2) posiblemente haciendo uso del equipamiento MPS provenientes de los transbordadores espaciales Atlantis y Endeavour en sus etapas centrales.[47][49][50] Los propelentes del SLS serán alimentados a los motores desde la etapa central, que consistirá de un estanque externo modificado del Transbordador Espacial con las tuberías MPS y motores en su parte trasera y una estructura interetapa en la parte superior.[3] Una vez que los RS-25D restantes sean usados, ellos serán reemplazados con una versión más barata desechable, actualmente designada como RS-25E ('E' por expendable, en castellano: fungible, desechable, prescindible).[3] Este motor puede estar basado en una o ambas de dos variantes de uso único que fueron estudiadas en el año 2005, el RS-25E (conocido como 'SSME de Cambio Mínimo Desechable', en inglés: Minimal Change Expendable SSME) y un incluso más simplificado RS-25F (conocido como 'SSME de Bajo Costo de Fabricación', en inglés Low Cost Manufacture Expendable SSME), ambas versiones estaban bajo evaluación en el año 2011.[30][51]
Referencias[editar]
| Video externo | ||
|---|---|---|
|
| ||
|
| ||
Atención: estos archivos están alojados en un sitio externo, fuera del control de la Fundación Wikimedia. |
 Wikimedia Commons alberga una categoría multimedia sobre Motores principales.
Wikimedia Commons alberga una categoría multimedia sobre Motores principales.
Este artículo incluye material de dominio público proveniente de sitios web y documentos de la NASA.
- Notas
- ↑ El nivel de aceleración inicialmente fue establecido en 65%, pero, después de revisar el desempeño de los primeros vuelos, esto fue incrementado a un mínimo de 67% para reducir la fatiga del MPS. El nivel de aceleración estaba calculado dinámicamente basado en el desempeño del lanzamiento inicial, generalmente siendo reducido a un nivel de alrededor del 70%.
- Citas
- ↑ a b c d e Aerojet Rocketdyne, Space Shuttle Main Engine (acceso 7 de noviembre de 2013)
- ↑ a b c d e f g h i j k l m n ñ o «Main Propulsion System (MPS)» (PDF). Shuttle Press Kit.com. Boeing, NASA & United Space Alliance. 6 de octubre de 1998. Archivado desde el original el 4 de febrero de 2012. Consultado el 7 de diciembre de 2011.
- ↑ a b c Chris Bergin (14 de septiembre de 2011). «SLS finally announced by NASA – Forward path taking shape». NASASpaceflight.com. Consultado el 14 de diciembre de 2011.
- ↑ a b «Space Shuttle Main Engine» (pdf). Pratt & Whitney Rocketdyne. 2005. Archivado desde el original el 8 de febrero de 2012. Consultado el 23 de noviembre de 2011.
- ↑ «NASA Relies on Copper for Shuttle Engine». Discover Copper Online. Copper Development Association. 1992. Archivado desde el original el 7 de diciembre de 2012. Consultado el 19 de enero de 2012.
- ↑ a b Steve Roy (August 2000). «Space Shuttle Main Engine Enhancements». NASA. Archivado desde el original el 11 de octubre de 2012. Consultado el 7 de diciembre de 2011.
- ↑ R.A. O'Leary and J. E. Beck (1992). «Nozzle Design». Threshold. Pratt & Whitney Rocketdyne. Archivado desde el original el 16 de marzo de 2008.
- ↑ a b c d e f g h Robert E. Biggs (May 1992). «Space Shuttle Main Engine: The First Ten Years». En Stephen E. Doyle, ed. History of Liquid Rocket Engine Development in the United States 1955–1980. AAS History Series. American Astronautical Society. pp. 69-122. ISBN 978-0-87703-350-9. Archivado desde el original el 25 de diciembre de 2011. Consultado el 12 de diciembre de 2011.
- ↑ «Nozzle Design». 16 de marzo de 2009. Archivado desde el original el 2 de octubre de 2011. Consultado el 23 de noviembre de 2011.
- ↑ «Computers in the Space Shuttle Avionics System». Computers in Spaceflight: The NASA Experience. NASA. 15 de julio de 2005. Consultado el 23 de noviembre de 2011.
- ↑ a b «The future of the shuttle's computers». NASA. 15 de julio de 2005. Archivado desde el original el 15 de febrero de 2017. Consultado el 23 de noviembre de 2011.
- ↑ «Space Shuttle Main Engine Controllers». NASA. 4 de abril de 2004. Archivado desde el original el 4 de marzo de 2016. Consultado el 8 de diciembre de 2011.
- ↑ RM Mattox & JB White (November 1981). «Space Shuttle Main Engine Controller» (PDF). NASA. Consultado el 15 de diciembre de 2011.
- ↑ «The Cause of the Accident». Report of the Presidential Commission on the Space Shuttle Challenger Accident. NASA. 6 de junio de 1986. Consultado el 8 de diciembre de 2011.
- ↑ Jim Dumoulin (31 de agosto de 2000). «Main Propulsion System». NASA. Archivado desde el original el 23 de enero de 2012. Consultado el 16 de enero de 2012.
- ↑ a b «Space Shuttle Main Engine Orientation» (PDF). Boeing/Rocketdyne. June 1998. Consultado el 12 de diciembre de 2011.
- ↑ Mark Wade. «HG-3». Encyclopedia Astronautica. Archivado desde el original el 15 de noviembre de 2011. Consultado el 13 de diciembre de 2011.
- ↑ Mark Wade. «M-1». Encyclopedia Astronautica. Consultado el 13 de diciembre de 2011.
- ↑ «MSFC Propulsion Center of Excellence is Built on Solid Foundation». NASA. 1995. Archivado desde el original el 27 de abril de 2015. Consultado el 13 de diciembre de 2011.
- ↑ a b c d e f g h i David Baker (April 2011). NASA Space Shuttle. Owners' Workshop Manuals. Haynes Publishing. ISBN 978-1-84425-866-6.
- ↑ Dwayne Day (12 de abril de 2010). «A bat outta Hell: the ISINGLASS Mach 22 follow-on to OXCART». The Space Review. Consultado el 8 de enero de 2012.
- ↑ a b Fred H. Jue. «Space Shuttle Main Engine: 30 Years of Innovation». Boeing. Archivado desde el original el 15 de octubre de 2011. Consultado el 27 de noviembre de 2011.
- ↑ a b c d e f Wayne Hale & various (17 de enero de 2012). «An SSME-related request». NASASpaceflight.com. Consultado el 17 de enero de 2012.
- ↑ «Countdown 101». NASA. 17 de septiembre de 2009. Archivado desde el original el 26 de enero de 2020. Consultado el 8 de enero de 2012.
- ↑ John Shannon (17 de junio de 2009). «Shuttle-Derived Heavy Lift Launch Vehicle» (PDF).
- ↑ a b «SSME Flight Experience» (JPEG). Pratt & Whitney Rocketdyne. November 2010.
- ↑ Chris Bergin (3 de diciembre de 2007). «Constellation transition – phased retirement plan for the SSME set». NASASpaceflight.com. Consultado el 23 de enero de 2012.
- ↑ a b «Report of the SSME Assessment Team» (PDF). NASA. January 1993. Consultado el 27 de noviembre de 2011.
- ↑ F. Jue and F. Kuck (July 2002). «Space Shuttle Main Engine (SSME) Options for the Future Shuttle» (DOC). American Institute of Aeronautics and Astronautics. Archivado desde el original el 23 de marzo de 2012. Consultado el 27 de noviembre de 2011.
- ↑ a b Ryan Crierie (13 de noviembre de 2011). «Reference Spacecraft Engines». Archivado desde el original el 5 de enero de 2020. Consultado el 8 de enero de 2012.
- ↑ «The Roar of Innovation». NASA. 6 de noviembre de 2002. Archivado desde el original el 8 de noviembre de 2002. Consultado el 7 de diciembre de 2011.
- ↑ «MSFC and Exploration: Our Path Forward» (PPT). NASA. September 2005. Archivado desde el original el 4 de marzo de 2016. Consultado el 7 de mayo de 2014.
- ↑ Mike Mullane (3 de febrero de 2007). Riding Rockets: The Outrageous Tales of a Space Shuttle Astronaut. Scribner. ISBN 0-7432-7682-5.
- ↑ Jim Dumoulin (28 de junio de 2001). «51-F». NASA. Archivado desde el original el 14 de mayo de 2011. Consultado el 16 de enero de 2012.
- ↑ a b Ben Evans (2007). Space Shuttle Challenger: Ten Journeys into the Unknown. Warwickshire, United Kingdom: Springer-Praxis. ISBN 978-0-387-46355-1.
- ↑ Jim Dumoulin (29 de junio de 2001). «STS-55». NASA. Archivado desde el original el 22 de febrero de 2012. Consultado el 16 de enero de 2012.
- ↑ Jim Dumoulin (29 de junio de 2001). «STS-51». NASA. Archivado desde el original el 2 de marzo de 2009. Consultado el 16 de enero de 2012.
- ↑ Jim Dumoulin (29 de junio de 2001). «STS-68». NASA. Archivado desde el original el 4 de enero de 2013. Consultado el 16 de enero de 2012.
- ↑ Ben Evans (30 de agosto de 2005). Space Shuttle Columbia: Her Missions and Crews. Springer Praxis. ISBN 978-0-387-21517-4.
- ↑ Dunn, Marcia (15 de enero de 2010). «Recession Special: NASA Cuts Space Shuttle Price». ABC News. Archivado desde el original el 18 de enero de 2010.
- ↑ a b c D Harris & C Bergin (26 de diciembre de 2008). «Return to SSME – Ares V undergoes evaluation into potential switch». NASASpaceflight.com. Consultado el 15 de diciembre de 2011.
- ↑ «Obama signs Nasa up to new future». BBC News. 11 de octubre de 2010.
- ↑ Lyons, 1992, p. 19.
- ↑ Federation of American Scientists , 1996.
- ↑ «NASA Announces Design For New Deep Space Exploration System». NASA. Consultado el 14 de diciembre de 2011.
- ↑ Chris Bergin (4 de octubre de 2011). «SLS trades lean towards opening with four RS-25s on the core stage». NASASpaceflight.com. Consultado el 14 de diciembre de 2011.
- ↑ a b Chris Bergin (13 de enero de 2012). «SSME family prepare for SLS core stage role following Shuttle success». NASASpaceflight.com. Consultado el 16 de enero de 2012.
- ↑ Carreau, Mark (29 de marzo de 2011). «NASA Will Retain Block II SSMEs». Aviation Week. Archivado desde el original el 20 de abril de 2011. Consultado el 30 de marzo de 2011.
- ↑ a b Chris Bergin (22 de enero de 2012). «Engineers begin removing orbiter MPS components for donation to SLS». NASASpaceflight.com. Consultado el 23 de enero de 2012.
- ↑ Chris Bergin (20 de septiembre de 2011). «PRCB managers recommend Atlantis and Endeavour become SLS donors». NASASpaceflight.com. Consultado el 14 de diciembre de 2011.
- ↑ P. McConnaughey et al. (February 2011). «NASA Technology Area 1: Launch Propulsion Systems». NASA. Consultado el 23 de enero de 2012.
{kind=link}
Enlaces externos[editar]
- Esta obra contiene una traducción derivada de «Space Shuttle main engine» de Wikipedia en inglés, concretamente de esta versión, publicada por sus editores bajo la Licencia de documentación libre de GNU y la Licencia Creative Commons Atribución-CompartirIgual 4.0 Internacional.
| Control de autoridades |
|
|---|
 Datos: Q1030042
Datos: Q1030042- Multimedia: RS-25 (rocket engine) / Q1030042