
Motor de corriente continua
El motor de corriente continua, denominado también motor de corriente directa, motor CC o motor DC (por las iniciales en inglés: direct current), es una máquina que convierte energía eléctrica en energía mecánica, provocando un movimiento rotatorio, gracias a la acción de un campo magnético.
Los componentes de un motor de corriente continua se dividen en dos partes:
- Estátor: parte que da soporte mecánico al aparato y contiene los polos de la máquina, que pueden ser devanados de hilo de cobre sobre un núcleo de hierro o imanes permanentes.
- Rotor: es un componente generalmente de forma cilíndrica, también devanado y con núcleo, alimentado con corriente continua a través del colector formado por delgas. Las delgas se fabrican generalmente de cobre y están en contacto alternante con las escobillas fijas.
El principal inconveniente que tienen estos motores es el mantenimiento costoso y laborioso, debido principalmente al desgaste que sufren las escobillas al entrar en contacto con las delgas. Las escobillas de los motores de baja potencia se fabrican de grafito. Por otro lado, los que requieren corrientes elevadas como los motores de arranque de los vehículos, se fabrican con una aleación de grafito y metal.
Algunas aplicaciones especiales de estos motores son: los motores lineales, servomotores, motores paso a paso o cuando ejercen tracción sobre un riel. Además, existen motores de CC sin escobillas (brushless en inglés) utilizados en el aeromodelismo por su bajo par motor y su gran velocidad.
Es posible controlar la velocidad y el par de estos motores utilizando técnicas de control de motores de corriente continua.
Principio de funcionamiento
[editar]_80_degree_split_ring.gif)

1, 2: Escobillas;
A, B: Delgas;
a, b: Lados de la bobina conectados respectivamente a las delgas A y B.
El principio de funcionamiento básico de un motor de CC se explica a partir del caso de una espira de material conductor inmersa en un campo magnético, a la cual se le aplica una diferencia de potencial (o voltaje) entre sus extremos, de forma que a través de la misma circula una corriente I.
Para este caso, la espira constituye el rotor del motor y los imanes que producen el campo magnético constituyen el estátor.
Entonces, dado que cuando un conductor, por el que pasa una corriente eléctrica, se encuentra inmerso en un campo magnético, este experimenta una fuerza según la Ley de Lorentz. Dicha fuerza, denominada Fuerza de Lorentz, es perpendicular al plano formado por el campo magnético y la corriente, y su magnitud está dada por:

- F: Fuerza en newtons
- I: Intensidad que recorre el conductor en amperios
- L: Longitud del conductor en metros
- B: Densidad de campo magnético o densidad de flujo tesla
- Φ: Ángulo que forma I con B
La espira experimenta fuerzas en sus dos segmentos laterales, como puede observarse en la animación de la derecha. Sin embargo, en el resto de los segmentos que interactúan con el campo magnético, las fuerzas experimentadas se cancelan entre sí.
Como puede observarse, las fuerzas en los segmentos laterales tienen una dirección y sentido tales que producen el giro del rotor. Sin embargo, existe un punto en el que el cambio de la posición de las espiras produce que la misma fuerza se oponga a continuar con el movimiento. Es en este punto en el que se cambia o alterna la polaridad del voltaje aplicado, lo cual cambia el sentido de la fuerza y, por ende, vuelve a impulsar el giro del rotor.
Es posible que el rotor supere este punto, en el que no se aplican fuerzas, debido a su inercia.[1]
Fuerza contraelectromotriz inducida en un motor
[editar]Es la tensión que se crea en los conductores de un motor como consecuencia del corte de las líneas de fuerza. La polaridad de la tensión en los generadores es opuesta a la aplicada en los bornes del motor. Durante el arranque de un motor de corriente continua se producen fuertes picos de corriente, ya que, al estar la máquina parada, no hay fuerza contra electromotriz y el bobinado se comporta como un simple conductor de baja resistencia.
La fuerza contra electromotriz en el motor depende directamente de la velocidad de giro del motor y del flujo magnético del sistema inductor.
Número de escobillas
[editar]Las escobillas deben poner en cortocircuito todas las bobinas situadas en la zona neutra. Si la máquina tiene dos polos, tenemos también dos zonas neutras. En consecuencia, el número total de escobillas ha de ser igual al número de polos de la máquina. En cuanto a su posición, será coincidente con las líneas neutras de los polos. En realidad, si un motor de corriente continua en su inducido lleva un bobinado imbricado, se deberán poner tantas escobillas como polos tiene la máquina, pero si en su inducido lleva un bobinado ondulado, como solo existen dos trayectos de corriente paralela dentro de la máquina, en un principio es suficiente colocar dos escobillas, aunque si se desea se pueden colocar tantas escobillas como polos.
Sentido de giro
[editar]En máquinas de corriente continua de mediana y gran potencia, es común la fabricación de rotores con láminas de acero eléctrico para disminuir las pérdidas asociadas a los campos magnéticos variables, como las corrientes de Foucault y las producidas por histéresis.
Reversibilidad
[editar]Los motores y los generadores de corriente continua están constituidos esencialmente por los mismos elementos, diferenciándose únicamente en la forma de utilización. Por reversibilidad entre el motor y el generador se entiende que si se hace girar el rotor, se produce en el devanado inducido una fuerza electromotriz capaz de transformarse en energía eléctrica. En cambio, si se aplica una tensión continua al devanado inducido del generador a través del colector delga, el comportamiento de la máquina ahora es de motor, capaz de transformar la fuerza contra electromotriz en energía mecánica.
En ambos casos, el inducido está sometido a la acción del campo magnético del inductor principal en el estátor.
Variaciones en el diseño del motor
[editar]Los motores de corriente continua se construyen con rotores bobinados y con estátores bobinados o de imanes permanentes. Además, existen muchos tipos de motores especiales, como por ejemplo los motores sin escobillas, los servomotores y los motores paso a paso, que se fabrican utilizando un motor de corriente continua como base.
Motores con estátor bobinado
[editar]Si el estátor es bobinado, existen distintas configuraciones posibles para conectar los dos bobinados de la máquina:
- Motor serie o motor de excitación en serie: el devanado de estátor y el devanado de rotor se conectan en serie.
- Motor shunt o de excitación en paralelo: el devanado de estátor y de rotor se conectan en paralelo.
- Motor de excitación compuesta o motor compound: se utiliza una combinación de ambas configuraciones.
-
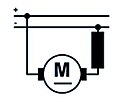 Motor eléctrico serie.
Motor eléctrico serie. -
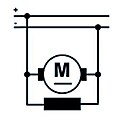 Motor eléctrico paralelo.
Motor eléctrico paralelo. -
 Motor eléctrico compound.
Motor eléctrico compound.





Motores de imán permanente (PM)
[editar]El advenimiento de nuevos materiales que se imanan de forma permanente, han viabilizado la construcción de este tipo de máquinas.
Es común denominar estas máquinas de conversión de energía como PM, siendo esta la abreviatura del inglés de Permanent-magnet Motors.
Aunque existen PMs de hasta 75 [hp], la mayor aplicación de estos equipos se encuentra en bajas potencias por condiciones económicas.
En un motor DC convencional, debe circular una corriente para la producción de flujo magnético de campo. En un PM, el flujo magnético no depende de la circulación de esta corriente por la presencia del imán y esta magnitud es esencialmente constante, dependiendo el flujo del entrehierro únicamente del punto de operación del motor.
Para una misma potencia de salida, un PM presenta mayor eficiencia y requiere menos material que su homólogo devanado DC. Sin embargo, el diseño debe tener en consideración el efecto de desmagnetización debido a la reacción de la armadura.
Como el flujo magnético en un PM es constante, las relaciones velocidad - torque y corriente torque son básicamente lineales, la primera decreciente y la segunda creciente.
La característica velocidad - torque de un PM puede ser controlado, modificando la tensión eléctrica de entrada o la resistencia del circuito de armadura. El cambio en la tensión de entrada repercute en la velocidad en vacío del motor, pero no repercute en la pendiente de la recta de la relación velocidad - torque. De otra manera ocurre al variar la resistencia del circuito de armadura, en el que el cambio de la resistencia, modifica la pendiente de la característica velocidad - torque, pero no se puede modificar la velocidad de vacío.[2]
Los motores de imán permanente tienen pocas ventajas de rendimiento frente a los motores síncronos de corriente continua de tipo excitado y han llegado a ser el predominante en las aplicaciones de potencia fraccionaria. Son más pequeños, más ligeros, más eficaces y fiables que otras máquinas eléctricas alimentadas individualmente.[3][4]
Motores sin escobillas
[editar]Los motores de corriente continua sin escobillas están diseñados para conmutar la tensión en sus devanados, sin sufrir desgaste mecánico. Para este efecto utilizan controladores digitales y sensores de posición. Estos motores son frecuentemente utilizados en aplicaciones de baja potencia, por ejemplo, en los ventiladores de computadoras.
Véase también
[editar]- Máquina eléctrica
- Motor de corriente alterna
- Motor eléctrico
- Motor serie
- Motor shunt
- Motor compound
- Generador síncrono de imán permanente (en inglés)
Referencias
[editar]- ↑ Young, Freedman (2009). «27». En Rubén Fuerte Rivera, ed. Física Universitaria (12.° edición). México: Pearson Educación. pp. 935 a 936 y 941 a 942. ISBN 978-607-442-304-4. Texto «1 » ignorado (ayuda)
- ↑ Electric Machinery and Transformers, Guru Bhag, Hiziroglu Hüseyin., 3erd ed., The Oxford series un electrical and computer engineering, 2001.
- ↑ Singly fed electric machine (en inglés)
- ↑ Gottlieb, I. M. (1994). Electric Motors & Control Techniques (2nd ed.). TAB Books.
Bibliografía
[editar]- Kuznetsov: 'Fundamentos de Electrotecnia,' Editorial Mir
- Kasatkin - Perekalin : 'Curso de Electrotecnia,' Editorial Cartago
Enlaces externos
[editar]- Control de motores de CC, Puente H
- Control de motores de CC, Control por Ancho de Pulso (PWM)
- Control de motores de CC, Circuitos con realimentación
- Información sobre los motores de corriente continua
- Más sobre los motores eléctricos de corriente continua
| Control de autoridades |
|
|---|