
Proyecto Morpheus
El Proyecto Morpheus es un proyecto desarrollado por la NASA para crear un vehículo de prueba con un despegue y aterrizaje vertical llamado Aterrizador Morfeo para exponer a una aeronave con un nuevo sistema propulsor no-tóxico (metano y oxígeno) y una tecnología de detención de peligro y aterrizaje autónomo. El prototipo del aterrizador planetario es capaz de despegar y aterrizar de forma vertical. Los vehículos son diseñados por la NASA como aterrizadores robóticos que pueden despegar y aterrizar con 1,100 libras (500 kg) de carga en la Luna.[1] El prospecto es un motor que corre a partir de propulsores que no son solo más baratos y seguros para la Tierra, sino que también pueden ser potencialmente manufacturados en la Luna o incluso Marte.[2] (Véase: Utilización de recursos in-situ.)
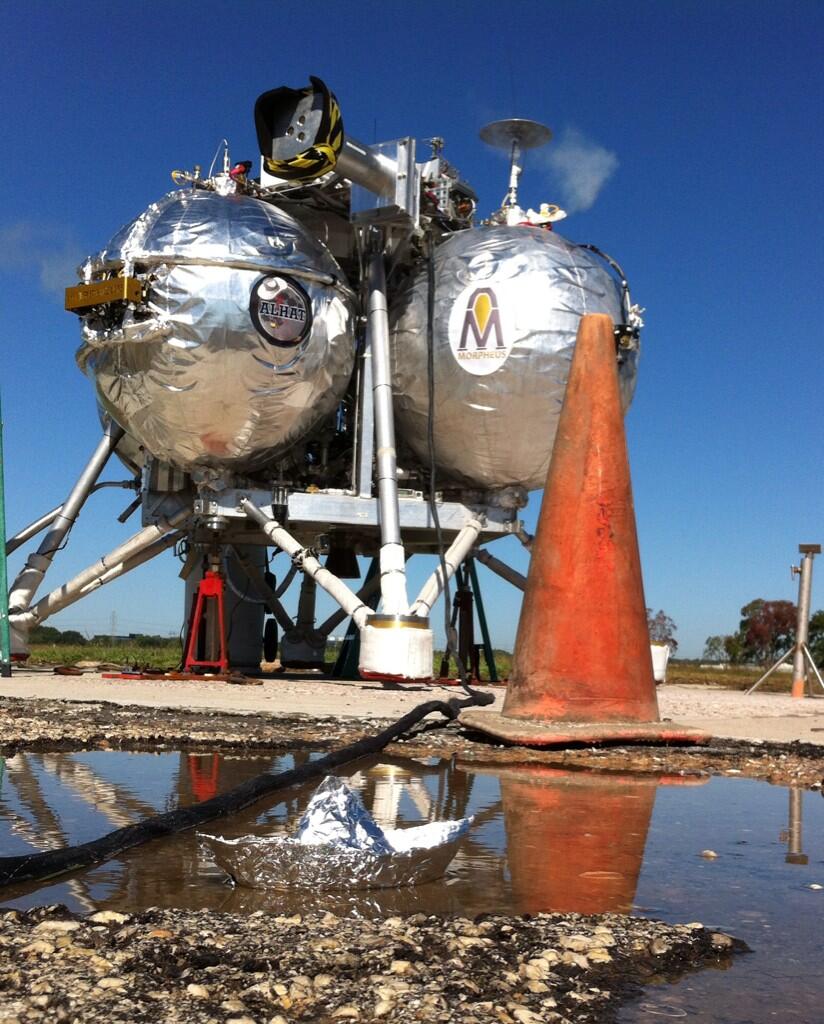
El prototipo Alfa fue manufacturado y ensamblado por el Centro Espacial Lyndon B. Johnson de la NASA y las instalaciones de Armadillo Aerospace cerca de Dallas.[1] El prototipo del aterrizador es una "aeronave" que tiene alrededor de 12 pies (3,7 m) en diámetro, pesa aproximadamente 2400 lb (1088,6 kg) y consiste de cuatro tanques propulsores esféricos de plata que tienen encima cajas aviónicas y una red de cables.[3][4][5]
El proyecto está intentando un "desarrollo delgado" de las prácticas de ingeniería para ahorrar tiempo y costos. Otras actividades de este proyecto incluyen operaciones terrestres apropiadas, operaciones aéreas, seguridad de los recorridos e instigación de procesos para el desarrollo de software. Las almohadillas de aterrizaje y los centros de control también fueron construidos.[1] Desde el inicio del proyecto en julio de 2010, alrededor de $14 millones de dólares fueron usados en materiales a lo largo de 4 años; así que el Proyecto Morpheus es considerado de bajo costo para la NASA.[4][6] En el 2012, el proyecto contrató a 25 miembros del equipo de tiempo completo[7] y a 60 estudiantes.[8][9] En todo momento un promedio de 40 personas trabajaban en el proyecto.[10] El Proyecto Morpheus diseñó y uso procesos y prácticas racionalizadas.[11] El último vuelo del aterrizador Morpheus fue en diciembre de 2014. Ya que no había fondos para más vuelos, el aterrizador fue regresado al Centro Espacial Lyndon B. Johnson en febrero de 2015.[12] Seis documentos formales fueron producidos por el proyecto. Al final de la revisión del proyecto el 12 de marzo de 2015, se estimó que se habían ahorrado $50 millones de dólares por los métodos de desarrollo delgado, minimizando la documentación, haciendo préstamos de materiales y comprando partes de tiendas Home Depot.[10]

Historia
[editar]
El Proyecto Morpheus inició en julio de 2010 y fue nombrado en honor de Morpheus (Morfeo en español), el dios griego de los sueños.[13] La aeronave Morpheus fue derivada del aterrizador experimental producido por el Proyecto M de la NASA con ayuda del centro Armadillo Aerospace. El "Proyect M" fue una iniciativa de la NASA para diseñar, desarrollar y aterrizar un robot humanoide en la superficie lunar en un plazo de 1000 días.[14] El trabajo en algunos de los sistemas de aterrizaje inició en el 2006 cuando el Proyecto Constelación de la NASA planeaba el regreso del humano a la Luna.[4]
En el año 2006, el centro Armadillo Aerospace inscribió al primer cohete aterrizador Pixels (cohete quad) en el Desafío del Aterrizador Lunar como parte del Desafío de Centenario de la NASA.[15] El vehículo de prueba Morpheus #1 Unidad A fue lanzado por primera vez el 15 de abril de 2011.[16] El nuevo motor de 4200 libras de fuerza (19,000 N) de Morpheus[17] permitió a la NASA diseñar un vehículo más grande que su predecesor; una copia del Cohete aterrizador de Pixels del centro Armadillo Aerospace. El motor fue mejorado otra vez en el 2013 a 5,000 lb finalmente alcanzando 5,400 libras de fuerza (24,000 N).[18][19] Un nuevo diseño del equipo de aterrizaje fue parte de los cambios mecánicos. La NASA también reemplazó la aviación; esto incluyó la distribución del poder y almacenamiento, instrumentación, computadora de vuelo, comunicación y software. El sistema de aterrizaje mejorado permitió a Morpheus aterrizar sin la ayuda de un piloto a diferencia de Cohete Pixels.[20] Para seguridad del campo, el prototipo Morpheus #1 cae e la categoría de cohete guía suborbital re-usable.[21]: p. 11 En julio de 2012, el prototipo de aterrizado fue enviado al Centro espacial John F. Kennedy para pruebas de vuelo libre en donde los medios fueron invitados a ver el aterrizador Morpheus.[22]
El 9 de agosto de 2012, el prototipo del aterrizador Morpheus #1 Unidad A (Alpha) se estrelló después del despegue mientras realizaba su primer vuelo sin ataduras en el Centro espacial John F. Kennedy. Nadie salió herido y no hubo daños de propiedad, pero el vehículo fue dañado sin posibilidad de reparación. El proyecto investigó la causa del accidente y continuó construyendo la Unidad B (Beta).[23] En el otoño del 2012, el Proyecto Morpheus y los equipos de ALHAT se combinaron.[24]
En 7 de febrero de 2013, el equipo del Proyecto Morpheus puso en un blog que habían construido los vehículos 1.5B y 1.5C de Morpheus. Los vehículos pasaron por una serie de pruebas de vuelo dinámicos con combustible caliente estático en el Centro Espacial Lyndon B. Johnson durante la primavera del 2013, en preparación del regreso de las pruebas de vuelo libre en el Centro espacial John F. Kennedy posteriormente ese año.[24][25] El 1 de mayo de 2013, el reemplazo Morpheus #1.5 Unidad B fue probado en el Centro Espacial Lyndon B. Johnson. Las mejoras de este reemplazo incluyeron un motor principal de empuje de 5,400 libras de fuerza (24,000 N), un control de vector de empuje (TVC) e integró un sistema de control de reacción al metano (RCS).[18][19] El 14 de junio de 2013, la re-utilización rápida fue demostrada por dos vuelos que usaron el mismo aterrizador en el mismo día.[26] En julio de 2013, los equipos de ALHAT fueron integrados y probados en el aterrizador.[27] El 26 de septiembre de 2013, los vehículos realizaron 20 pequeños disparos de motor en varias condiciones mientras estaban atados al suelo.[28] En noviembre de 2013, el aterrizador Bravo fue llevado a Centro espacial John F. Kennedy (KSC) en Florida para tres pruebas de vuelo.[29][30] $750,000 de dólares en partes fueron compradas para hacer reemplazos al aterrizador. KSC limitó el sonido de la vibraciones del aterrizador ya que se levantaba por el diseño de una almohadilla de lanzador móvil con una trinchera en flamas incluida.[9]
El vuelo libre 9 el 11 de marzo de 2014, fue el último vuelo previo a la integración de los sensores de ALHAT en el vehículo Bravo.[31] El vuelo libre 14 el 28 de mayo de 2014, fue realizado en la noche usando a ALHAT como el sistema principal guía. Los peligros en el campo de pruebas fueron automáticamente evitados.[32] En mayo de 2014, el Proyecto Morpheus formó parte del material de referencia para la iniciativa CATALYST Lunar de la NASA.[33]
Un trabajo fue publicado en el 2013 revelando las lecciones aprendidas durante el desarrollo, que podrían resultar útiles para proyectos futuros.[34] En el 2014, un trabajo describiendo la campaña integrada de pruebas incluyendo los vuelos libres fue publicado.[35] Un artículo relatando una pequeña historia acerca del proyecto fue impreso en RocketSTEM el 11 de julio de 2014.[36] En noviembre de 2014, se le agregaron sensores ALHAT al aterrizador Morpheus. Las nuevas ópticas permiten la Navegación Doppler Lidar para medir correctamente la velocidad relativa del vehículo en la tierra.[37]
Objetivos
[editar]El objetivo principal del proyecto Morpheus es demostrar:
- El rendimiento del sistema integral del sistema autónomo de Guía, Navegación y Control (GN&C),
- Los sensores de terreno para evitar peligros,
- La combinación de los sensores con el GN&C,
- La utilización de una configuración quad de oxígeno líquido y metano líquido para un sistema de propulsión.[38][39]
Específicamente, el proyecto Morpheus y el proyecto de Tecnología de Aterrizaje Autónomo para Anulación de Peligros (ALHAT) proveen las bases tecnológicas para componentes claves necesarios para el transporte humano más allá de la órbita baja terrestre.[1]
El banco de pruebas puede ser ajustado opcionalmente con el equipo de la Tecnología de Aterrizaje Autónomo para Anulación de Peligros (ALHAT) de 400 libras (180 kg), permitiendo aterrizajes sin necesidad de interacción con un operador.[3][40] ALHAT le permite al aterrizador volar a un locación específica con gran precisión y automáticamente evita peligros incluyendo pendientes de más de 5 grados y rocas más altas que 30 cm.[41]
En junio de 2013, el equipo remarcó el potencial de escalar el aterrizador de 500 kg para producir un módulo habitable capaz de aterrizar con un equipo en lugares como la Luna.[42]
Especificaciones del hardware.
[editar]| Descripción | Tamaño | Ref |
|---|---|---|
| Carga útil | 500 kg | [1] |
| Masa en seco | ~1100 kg | [3] |
| Propulsores | metano/oxígeno líquido | [38] |
| Masa propulsores | 2900 kg | [38] |
| Tanques propulsores | 4 off | [4] |
| Presurización | helio | [1] |
| Alto | 3.7 m | [5] |
| Diámetro | 3.7 m | [5] |
| Motor principal | HD5 | [24] |
| Propulsores primarios RCS | metano/oxígeno líquido | [19] |
| Empuje RCS | 22–67 N | [43] |
| Propulsores de reserva RCS | helio (He) | [44] |
| Hardware opcional | ALHAT | [40] |
| Clase de láseres en ALHAT | IV | [45] |
| Descripción | Tamaño | Ref |
|---|---|---|
| Empuje | 24000 N | [18] |
| Impulso específico | 321 s | [46] |
| Quemadura máxima (probada) | 123 s | [24] |
| Propulsores | metano/oxígeno líquido | [38] |
| Rango del acelerador | 4:1 | [18] |
| Radio de mezcla del combustible | (TBD) | - |
| Radio de boquilla ratio | (TBD) | - |
| Aire de inicio | si | [47] |
| Motor re-iniciable | si | [26] [28] |
| Servicio máximo de vida | (TBD) | - |
| Peso | (TBD) | - |
| Cámara de presión | (TBD) | - |
| Manufactura | NASA JSC | [1] |
| Rango mínimo para inyectar durante el encendido | ~15 feet | [35] |
| Costo de manufactura por motor (2013) | $60,000 | [10] |
El vehículo del Proyecto Morpheus, Morpheus, es un vehículo a escala que la NASA pretende sea capaz de aterrizar un Robonaut o una carga útil similar en la superficie lunar. La aeronave realizará todas las quemas de propulsores después de la inyección translunar.[1][48]
La navegación es completamente autónoma de la órbita lunar. Las mejoras en la navegación vienen de los láseres TRN y los rastreadores de estrellas después de la quema en la órbita. La navegación del espacio profundo recae en la métrica de radio y los rastreadores de estrellas.[49]
Para ahorrar dinero y tiempo, los prototipos de aterrizador Morpheus son prototipos de "una sola cuerda"; esto significa que a diferencia de las aeronaves calificadas para vuelos en el espacio actúa estos no tiene un sistema redundante. Las excepciones son dichas abajo.[7]
- Morpheus #1.5 Unidad A
- El motor quema los propulsores respetuosos con el medio ambiente de metano y oxígeno[38] presurizado por helio.[1]
- El motor HD5 de Morpheus produjo un empuje 4,200 libras de fuerza (19,000 N)[17] compatible con el estado de ascenso del módulo LSAM.[39] (Posteriormente mejorada para la Unidades B y C, véase abajo).
- El motor tiene un impulso específico (Isp) máximo durante un vuelo espacial de 321 segundos.[46]
- El motor criogénico alimentado por presión soporta una estrangulación de 4:1 y afecta con un elemento inyector en el diseño.[18]
- El motor es soportado por dos accionadores electromecánicos ortogonales (EMAs) para proveer impulso al control de vector de traducciones verticales, y actitudes de cabeceo y guiñada.[46]
- Tiene cuatro tanques de 48 plg (1219,2 mm) diámetros, 2 para metano líquido y 2 para oxígeno líquido, capaces de contener alrededor de 2900 kg (6393,4 lb) en propulsores.[38]
- La masa en seco aproximada es de 2400 lb (1088,6 kg).[3]
- Tamaño de alrededor de 12 pies x 12 pies x 12 pies (3.7 m x 3.7 m x 3.7 m).[5]
- La versión 1.5 del aterrizador, con el motor HD5, puede aterrizar en 1100 lb (499 kg); esto incluye el probar todos las quemaduras de propulsores después de un inyección translunar.[1]
- El empuje del sistema de control de reacción (RCS) primario, usó el control del deslizador del aterrizador, metano y oxígeno líquido de los tanques principales.[46][19] El empuje produjo 5–15 libras de fuerza (22–67 N).[43]
- El respaldo del sistema de control de reacción usa helio (He).[44]
- Una tableta Aitech S950 CompactPCI con un procesador PowerPC 750 es usada como la computadora principal.[46]
- Se pueden guardar hasta 16 GB de datos a bordo.[46]
- Los buses de datos incluyen RS-422, RS-232, ethernet y MIL-STD-1553.[46]
- En el vuelo, las aviónicas y las unidades de poder (APU) son enfriadas usando metano líquido. Cualquier vapor resultado es posteriormente ventilado.[50]
- En la tierra el nitrógeno líquido es usado para el enfriamiento de las aviónicas. Antes de los vuelos las aviónicas son purgadas de agua usando nitrógeno gaseoso.[46]
- Cámara a bordo.[46]
- La telemetría se regresa usando las comunicaciones inalámbricas de espectro ensanchado.[46]
- El poder eléctrico es dado por 8 baterías de polímero de litio.[46]
- La suite de sensores GN&C incluye:
- Receptor de Sistema Global de Posicionamiento (GPS) Javad.
- La versión de Honeywell del GPS del Espacio Integrado (SIGI) de la Estación Espacial Internacional (ISS).
- Unidad Litton LN -200 de Medición Inercial (IMU)
- Láser de altímetro agudo.[46]
- El Software de Núcleo de Vuelo (CFS) del Centro de vuelo espacial Goddard provee la arquitectura para el software del vehículo.[46]
- Cada una de las 4 patas tiene una almohadilla pie cubierta con material resistente al fuego para suavizar los aterrizajes.[51]
- Las unidades del acelerómetro independiente fueron construidos usando un Sistema Modular de Instrumentación (MIS) diseñado por el Centro Espacial Lyndon B. Johnson.[52]
- Hardware ALHAT opcional. El equipo ALHAT y sus masas son consideradas parte de la carga útil.[40]
Los comandos pueden ser enviados usando una radio de Frecuencia Ultra Alta (UHF) separada para empujar los sistemas de terminación (TTS). El uso de los sistemas de terminación para la seguridad del campo cierran dos válvulas motorizadas que se apagan para que fluya el oxígeno líquido y el metano al motor finalizando el empuje del motor. Estas válvulas de los sistemas de terminación son completamente independientes del resto de los sistemas del vehículo. Los sistemas de terminación detienen el disparo del láser en el Sistema de Detección de Peligros de ALHAT ya que los láseres de Tipo IV no son seguros para el ojo humano.[46][53]
(Para más detalles véase el artículo "Morpheus: Tecnología Avanzadas para la Exploración Humana".)[46]
- Morpheus #1.5 Unidad B

El prototipo del aterrizador Morpheus #1.5 Unidad B usa el mismo diseño de prototipo del aterrizador Morpheus #1.5 Unidad A con los siguientes cambios:[7]
- Sistema de respaldos para la Unidad de Medidas de Inercias fueron agregados.[7]
- 70 diferentes mejoras al vehículo y sistemas terrestres se hicieron para hablar con contribuidores potenciales al fracaso de las pruebas y también para mejorar la operabilidad y mantenibilidad.[19] Estos incluyen:
- Capacidad del rendimiento avanzado del motor.
- Protocoles de comunicación mejorados.
- Instrumentación redundante cuando es apropiada.
- Márgenes estructurales aumentados.
- Ambientes mitigados de lanzamiento vibro-acústico.[19]
- La NASA hizo procesos mejorados para del motor de Morpheus con empujes de 5,400 libras de fuerza (24,000 N).[18]: p. 4
- Los proyectos estiman que el nuevo motor podría levanta la etapa de ascenso de un aterrizados piloteado conteniendo de 3 a 4 personas en la órbita lunar.[54]
- Los conectores fueron reemplazados por las versiones con especificaciones militares.[55]
- Re-utilización rápida permite múltiples vuelos en un día.[26]
- El aterrizador puede manejar vientos de alrededor de 10 millas por hora (16,1 km/h).[56]
- Para reducir los problemas vibro-acústicos del despegue durante las pruebas del aterrizador fue levantado a 15 pies (4.6 m) arriba del suelo y una cuerda de peso ligero que se derrite es usada para sostener al aterrizador en la tierra.[35]
- La Unidad B también es llamada el vehículo Bravo.[25]
- Morpheus #1.5 Unidad C
El prototipo del aterrizador Morpheus #1.5 Unidad C está usando el mismo diseño que prototipo de aterrizador Morpheus #1.5 Unidad A con los siguientes cambios:[7]
- Mejorar como el de la Unidad B arriba. El vehículo nunca fue volado.[7]
Tecnología de Aterrizaje Autónomo para Anulación de Peligros
[editar]El equipo de la Tecnología de Aterrizaje Autónomo para Anulación de Peligros (ALHAT) opcional permite el aterrizaje sin interacción del operador.[40] ALHAT permite al aterrizador volar en una locación específica con gran precisión y automáticamente detecta y evita peligros, incluyendo picos de más de 5 grados y piedras de más de 30 cm.[41] Los sensores activos incluyen un flash LIDAR, un velocímetro lidar Dopplet y un láser de altímetro.[45][57]
Software
[editar]
La filosofía del desarrollo delgado del Proyecto Morpheus resultó en el uso de una mezcla de un nuevo y previamente existente software. El software es usado en:
- El banco de pruebas vertical (aterrizador).[58] El Software de Núcleo de Vuelo (CFS) creado por el Centro espacial de vuelo Goddard de la NASA ha sido mejorado con aplicaciones específicas de software y sensores a medida y aplicaciones I/O.
- Desarrollo de hardware.[59] Incluyendo el uso del paquete OVERFLOW (y las pruebas de túneles de viento).
- El ambiente terrestre incluyendo la misión de control.[60] Las tecnología de control de misión ha sido usada para demostrar las presiones de los tanques propulsores y otros parámetros durante las pruebas de disparos.[61]
- El sistema ALHAT.[62]
- La simulación de vuelo tanto fuera de línea como conectado con el hardware de vuelo.[63] Los paquetes usados incluyen e Ambiente de Truco de Simulación, el paquete de Dinámicas de Ingeniería Orbital y los modelos genéricos del paquete Valkyrie, todos del Centro Espacial Lyndon B. Johnson. Los parámetros han sido modificados para reflejar el hardware de vuelo de Morpheus como el transmisor de fuerza y los datos obtenidos de las pruebas de vuelo racionalizadas.
- El paquete Microsoft SharePoint fue usado por los ingenieros y gerentes para planear, compartir documentos y proveer con un método de control para la configuración de cambios.[64]
- Los documentos eran frecuentemente escritos usando Microsoft Office.[64]
Banco de pruebas
[editar]
- 2011
Para abril de 2011, el enfoque principal del banco de pruebas era demostrar la propulsión integrada y los sistemas de guía con base de inercia, navegación y control (GN&C) que pueden volar en un perfil de descenso lunar, por lo tanto usando la Tecnología de Aterrizaje Autónomo para Anulación de Peligros (ALHAT), los sensores de aterrizaje seguro y el sistema de control de vuelos en ciclo cerrado.[39]
Los objetivos adicionales incluyen demostraciones de tecnología como materiales de tanques y manufacturas, empujadores de reacción de control, mejorar al rendimiento del motor principal, sistemas de presurización de helio, operaciones terrestres, operaciones aéreas, seguridad del campo, software y arquitectura de aviación.[1]
El complejo de vuelo del Banco de Pruebas Vertical (VTB) en el Centro Espacial Lyndon B. Johnson ha sido utilizado en softwares de Misiones de Control de Tecnología (MCT) escrito en la NASA para controlar las pruebas de vuelo del aterrizador Morpheus. Los parámetros mostrados incluyen tanques propulsores a presión.[65]
Un set de pruebas integradas de vehículos de vuelos incluyendo combustible caliente, pruebas de flotación y “vuelos libres” fueron diseñados para el vehículo Morpheus.[46]
Para proveer espacio para el penacho de escape del vehículo durante las pruebas de combustible caliente, el aterrizador fue atado a 20 pies (6.1 m) por encima del suelo. La altura de 15 pies (4.6 m) fue usado para las pruebas de las ataduras.[35]
Las pruebas, los resultados y las modificaciones del equipo realizadas durante el 2011, hasta e incluyendo a la Prueba de Ataduras 6, fueron publicadas en una conferencia en el 2012 después de la Conferencia del Espacio Areo IEEE en Big Sky, MT.[66]
- 2012
Videos de las pruebas de vuelo fueron subidos al canal de Youtube del Aterrizador Morpheus. Esto incluye la regresión de pruebas de vuelo en el 2012 con el motor más potente V1.5 mientras el aterrizador es atado, y la temprana prueba de vuelo problemática que mostraba la leyenda "Por esto hacemos pruebas".[67]
El 10 de mayo de 2012, el banco de pruebas pasa los exámenes en flotación y aborto suave mostrado en el video "Prueba de Atadura Morpheus 15".[67] El aterrizador fue regresado al taller para ajustar el equipo ALHAT. Los propulsores del Sistema de Control de Reacción también fueron ajustados.[68][69]
Durante el verano del 2012, el aterrizador Morpheus V1.5 Unidad A fue transferido al Centro espacial John F. Kennedy en Florida para una prueba de vuelo sin ataduras. También un "campo de peligro" fue construido fue construido con obstáculos como rocas y cráteres construidos al final de la Shuttle Landing Facility para probar el sistema ALHAT que puede navegar automáticamente en un área de aterrizaje lisa.[70] Como puede ser visto en la fotografía arriba, los espacios aéreos abiertos del Centro Kennedy permiten que el camino completo del vuelo y el campo de peligros estar rodeados por una detención de fuegos que consisten de una fosa llena de agua.
El campo de peligro de 330 por 330 pies (100 por 100 m) incluyó cinco almohadillas de aterrizaje potenciales, 311 pilas de rocas y 24 cráteres que imitan un área en el polo sur de la Luna.[4]
El 20 de julio de 2012, en el 43 aniversario del aterrizaje lunar del Apolo 11, el vehículo de prueba llegó al Centro espacial John F. Kennedy (KSC) para pruebas avanzadas. El alto rendimiento de la versión de motor HD5 en Morpheus fue probada en el Centro espacial John C. Stennis en el verano del 2012. La prueba y construcción del campo de peligros fueron pagados por el Programa de Sistemas Avanzados de Exploración (AES) de la NASA.[71]
- 2013
Durante el otoño del 2012 y el inicio del 2013, una cuarta y quinta generación de motores de metano/oxígeno líquido fueron probados en el Centro espacial John C. Stennis. La duración de quema exitosa fue de 123 segundos. Otras pruebas verificaron las capacidades y niveles de aceleración.[24]
El equipo ALHAT fue probado usando un helicóptero sobre el campo de peligros en el Centro espacial John F. Kennedy. Múltiples vuelos fueron hechos usando trayectorias parecidas a la de Morpheus en donde tuvieron que tomar en cuenta la dirección del viento.[24]
Los tanques de combustibles para el aterrizador fueron puestos a prueba en una serie de inspecciones incluyendo la revisión de defectos en soldaduras y rotando las presiones del tanque para establecer un ciclo mínimo de esperanza de vida de los tanques. La capacidad de presión máxima fue verificada al presurizar un tanque artificial hasta que este explotó.[24]

El primero de mayo de 2013, en el Centro Espacial Lyndon B. Johnson, el banco de pruebas de reemplazo de la Unidad B fue disparado por 50 segundos mientras estaba completamente atado. El sistema de reacción metano integrado (RCS) y los jets del control de vector de empujes (TVC) también fueron disparados. Muchas mejoras fueron incorporadas al vehículo y los sistemas terrestres.[19]
El 16 de mayo de 2013, en el banco de pruebas del Centro Espacial Lyndon B. Johnson fue disparado mientras era sujetado al suelo y posteriormente atado a 3 pies (0.91 m) encima de suelo seguido por algunas pruebas de sistema de reacción de control. Una pequeña fuga fue reparada permitiendo que la prueba de los efectos de vibración fueran nominales. En la preparación de las pruebas, la prevención del fuego alrededor del área de pruebas fue pavimentada y se cavó una mini "trinchera de fuego".[47][72]
El 24 de mayo de 2013, en el Centro Espacial Lyndon B. Johnson, el banco de pruebas V1.5B fue atado a gran altura. Había una buena ignición y escala. Un pequeño aborto terminó el vuelo cuando el vehículo excedió un límite interno de barreras mientras intentaba estabilizarse.[54]
El 6 de junio de 2013, en el Centro Espacial Lyndon B. Johnson la prueba de ataduras 22 fue volada con éxito en el banco de pruebas por 74 segundos. La flotación duró 60 segundos y fue tranquila.[73] Se utilizó la IMU primaria.[74]
El 11 de junio de 2012, en la prueba de ataduras del Centro Espacial Lyndon B. Johnson, el repuesto de la Unidad de Medida de Inercia (IMU) pasó su prueba de vuelo. El vuelo duró 27 segundos incluyendo 18 segundos en flotación.[74]
El 14 de junio de 2013, dos vuelos atados fueron realizados. El primer disparo fue abortado cuando el vehículo excedió su zona de seguridad por un desbalance en el relleno de combustible. El segundo disparo fue exitoso. Estos contaron con un reinicio del motor. Durante el segundo vuelo, el vehículo cambio con éxito de la Unidad de medición inercial (IMU) primaria a una IMU secundaria.[26]
El 2 de julio de 2012, las pruebas de integración fueron hecha con el ALHAT adjuntado al aterrizador Morpheus. Estas pruebas incluyeron pruebas de "inclinación" en donde la patas del aterrizador eran levantas en diferentes bloques de altura para lograr una actitud fuera de lo vertical.[75]
El 11 de julio de 2013, la primera prueba de vuelo atado del vehículo "Bravo" de Morpheus con los sensores de láser integrados en la Tecnología de Aterrizaje Autónomo para Anulación de Peligros (ALHAT) fue hecha. En el segundo intento tuvi una buena ignición, pero durante el ascenso el vehículo se trasladó una distancia horizontal y excedió el rango del límite de seguridad interno (+/-4m) para pruebas de ataduras, provocando un aborto automático.[27]
El 23 de julio de 2013, la Prueba de Ataduras 26 se realizó con éxito. El aterrizador y el ALHAT volaron y flotaron en dos diferentes alturas. Tanto el RCS primario (metano/oxígeno líquido) como el RCS de repuesto (He) fueron usados produciendo un 'aterrizaje' exitosos al final de la atadura. La excursión lateral tuvo un máximo de solo ~0.2 m. El rastreo del ALHAT y las imágenes eran nominales logrando identificar los objetivos peligrosos.[44]
En 27 de julio de 2013, la combinación de Morpheus/ALHAT en la Prueba de Ataduras 27 funcionó. El aterrizador fue lanzado, dio imágenes del ALHAT y una traducción lateral.[76]
El 7 de agosto de 2013, la Prueba de Ataduras 28 se realizó con éxito. En un vuelo de 80 segundos, el vehículo ejecutó un motor de ignición, un ascenso, una traducción lateral de 3 metros sobre suelo de Marte simulado, una flotación de 40 segundos, y un descenso en inclinación para el "aterrizaje" con guía de vuelo libre. El suelo de Marte simulado provisto por el Laboratorio de Propulsión a Chorro (JPL) fue parte de un estudio de pluma.[77]
El 23 de agosto de 2013, el aterrizador Bravo realizó la Prueba de Ataduras 29 con éxito en el Centro Espacial Lyndon B. Johnson. Durante los 50 segundos de vuelo, Bravo incluyó ignición, ascenso y una traducción lateral de 3 metros. Hubo una flotación de 10 segundos en el ápice y un descenso en inclinación a la grúa de "aterrizaje" usando una guía de vuelo libre.[78]
El 29 de agosto de 2013, el aterrizado Bravo realizó la Prueba de Vuelo de Ataduras 30 con éxito en el JSC. Después del ascenso de 5 metros con 15 segundos de flotación en el ápice, una traducción lateral de 3 metros fue hecha seguida por otros 15 segundos de flotación y un descenso inclinado hacia adelante.[25]
El 18 de septiembre del 2013, el aterrizador Bravo realizó con éxito la Prueba de Ataduras 31 con grandes vientos. Este vuelo fue rápidamente cambiado después de que las pruebas del día previo fueran revisadas. Varios problemas fueron resueltos por el equipo.[56]
El 24 de septiembre del 2013 el aterrizador fue lanzado desde el suelo. Varios problemas fueron detectados y resultó en un aborto. Los problemas incluyeron una falsa "boquilla de motor quemada" e inestabilidad en el encendido del motor. El 26 de septiembre del 2013, la prueba HF10 fue hecha. Esto involucró 20 disparos cortos del motor en el mismo día en varias presiones, temperaturas y niveles de poder. La investigación buscaba sondear la inestabilidad de los límites del motor durante el encendido.[28][79]

El 29 de octubre de 2013, el aterrizador y su cohete con motor de metano/oxígeno líquido realizó seis quemas de 600ms mientras estaba arriba en la trinchera en el Centro Espacial Lyndon B. No hubo inestabilidades.[80] El primero de noviembre de 2013, con todas las mejoras al software y hardware incluidas, el aterrizador realizó con éxito una prueba de vuelo con ataduras. El vehículo realizó un inicio de aire mientras era soportado por las ataduras.[81] El 7 de noviembre de 2013, el proyecto completó la pruebas del aterrizador en el Centro Espacial Lyndon B. Johnson con una Prueba terrestre de Lanzamiento y Aterrizaje (GTAL). El vehículo volaba nominalmente y aterrizaba con 1 in (2.5 cm) a través del rango y 6 in (15 cm) en la distancia horizontal viajada. La prueba GTAL caracteriza el rendimiento del vehículo al levantarlo de unos soportes de lanzamiento en el suelo volando a una altura 21 pies (6,4 m), flotando y descendiendo en perfil, y aterrizando de regreso en el suelo en almohadillas separadas de su punto de lanzamiento a 10 pies (3 m). Esto sugiere que la fallas reveladas por el Incidente 2 el 9 de agosto de 2012, habían sido encontradas y reparadas.[30][82]
El 6 de diciembre de 2013, el vehículo integrado pasó la Prueba de Ataduras Test 33 en el Centro espacio John F. Kennedy en Florida. Esto fue repetido por la prueba de ataduras 29. La prueba fue primariamente hecha para verificar que el aterrizador Bravo estuviera bien después se ser transportado desde Texas.[83] El 10 de diciembre de 2013, el primer vuelo libra del prototipo del aterrizador Morpheus fue conducido con éxito en las Instalaciones de Aterrizaje de Shuttle en el Centro espacial John F. Kennedy. En prueba de 54 segundos, el aterrizador Morpheus fue lanzado desde el suelo encima de las trincheras de fuego y ascendió aproximadamente 50 pies para después flotar alrededor de 15 segundos. El aterrizador después voló hacia adelante y aterrizó en sus almohadillas a 23 pies de distancia del punto de lanzamiento y a 6 pulgadas del punto objetivo.[9][84][85]
El 17 de diciembre de 2013, el aterrizador Morpheus realizó con éxito el Vuelo Libre 4. La trayectoria previamente planeada fue volada sin problemas aterrizando a 3.5 pulgadas del objetivo destinado. El ascenso de Morpheus del suelo sobre la trinchera fuego fue a una altitud de cerca de 164 pies (50 m) después de pausar brevemente a los 82 pies (25 m) para mantener las velocidades de ascenso destinadas. El vehículo después voló adelante cubriendo alrededor de 154 pies (47 m) en 30 segundos antes de descender y aterrizar en una almohadilla de aterrizaje dentro del campo de peligro ALHAT.[86][87]
- 2014
El 16 de enero de 2014, el Vuelo Libre 5 fue realizado con éxito en el las Instalación de Aterrizaje de Shuttle en el Centro espacial John F. Kennedy. El vehículo Bravo voló más alto y rápido que en vuelos anteriores. La trayectoria planeada involucró un ascenso rápido de 57 m (187 pies) atravesando 47 m (154 pies) mientras descendía y posteriormente aterrizando a aproximadamente 11 pulgadas del objetivo indicado en el campo de peligros alrededor de un minuto después del despegue.[88] El 21 de enero de 2014, Bravo realizó el Vuelo Libre 6. En un vuelo de 64 segundos el vehículo ascendió 305 pies (93,0 m) y después voló adelante 358 pies (109,1 m) en 25 segundos. Como fue planeado, Bravo aterrizó en el campo de peligros a 0.38 m (15 pulgadas) del objetivo. La velocidad máxima de ascenso fue de 11.4 m/s (25.5 mph).[89]
El 10 de febrero de 2014, el Vuelo Libre 7 fue volado en el Centro espacial JFK. Bravo. Se voló a 467 pies (142 m) de altitud y atravesó 637 pies (194 m) en 30 segundos antes de aterrizar en el campo de peligros. El vehículo voló la trayectoria planeada sin problemas alcanzando una velocidad máxima de ascenso de 13 m/s, y aterrizando en su objetivo determinado 74 segundos después del lanzamiento.[90] Los ingenieros dicen que la altitud durante las pruebas no es lo más importante, pero si lo es la experiencia de vuelo ganada incluyendo las fases del revisión, carga a tierra, vuelo, y recuperación de operaciones.[2]
El 14 de febrero y el 3 de marzo de 2014, las pruebas de combustible caliente en el Sistema de Control Deslizable (RCS) usando una variedad de pulsos pequeños y largos fueron realizadas en el Centro espacial John F. Kennedy.[91][92] El equipo de Morpheus multi-céntrico fue implementado con éxito en el Vuelo Libre 8 en las Instalaciones de Aterrizaje Shuttle (SLF) del Centro espacial John F. Kennedy (KSC) el 5 de marzo de 2014. El vehículo Bravo voló a una altitud de 467 pies (142,3 m) y atravesó 637 pies (194,2 m) en 36 segundos, incluyendo una desviación del curso a la mitad del vuelo, antes de aterrizar en el campo de peligros a 56 pies (17,1 m) del objetivo original (simulando como evitar un peligro). El vehículo alcanzó la velocidad máxima de ascenso de 13 m/s y aterrizó aproximadamente a 10 pulgadas del objetivo determinado 79 segundos después del lanzamiento.[93]
El martes 11 de marzo de 2014, el equipo de Morpheus completó con éxito el Vuelo Libre 9 (FF9) en el SLF de KSC. Este fue el vuelo más alto de Morpheus, (177 m (580,7 pies; 193,6 yd) más alto incluso que el Monumento Washington, rápido (13,4 m/s (30,0 mph; 48,2 km/h) vertical & horizontal) y de más distancia (255 metros (836,6 pies; 278,9 yd) hasta la fecha.[31]
Durante el resto de marzo de 2014, el hardware ALHAT fue insertado nuevamente permitiendo pruebas de ataduras exitosas de la asamblea del 27 de marzo de 2014. La trayectoria de la Prueba de Vuelo de Ataduras 34 fue similar a la TT33 y TT29 con dos flotadores y una traslado de 3 metros (9,8 pies; 3,3 yd) durante un ascenso de 3,25 metros (10,7 pies; 3,6 yd).[94] El Vuelo Libre 10 (FF10) tomó lugar el 2 de abril de 2014, con el modo cíclico de ALHAT. ALHAT mostraba imágenes del campos de peligros y calculaba soluciones para la navegación en tiempo real. Morpheus ascendió a una altitud máxima de alrededor de 804 pies (245m), después voló de frente y abajo, inicialmente a 30 grados para posteriormente nivelarse cubriendo un total de 1334 pies (406.5m) horizontalmente en 50 segundos mientras se desviaba a un locación de aterrizaje a 78 pies (23.8m) del objetivo inicial, para después descender y aterrizar en un almohadilla de aterrizaje al frente (sur) del campo de peligros de ALHAT. El total del tiempo de vuelo fue de 96 segundos; el tiempo de vuelo más largo hasta la fecha.[95] El Vuelo Libre 11 del 24 de abril de 2014 fue repetido por el Vuelo Libre 10 con algunos cambios hechos al ALHAT.[96] El 30 de abril de 2014, el Vuelo Libre 12 hizo una repetición del FF10 con el ALHAT eligiendo la locación del aterrizaje.[97]
El 22 de mayo de 2014, el Vuelo Libre del ALHAT determinó la locación segura en el campo de peligros y voló para aterrizar en ésta.[98]
El equipo Morpheus/ALHAT completó con éxito el Vuelo Libre 4 (FF14) en el SLF del KSC el miércoles 28 de mayo de 2014. El vuelo libre 12 de Bravo y 5 de ALHAT, fue la primera vez que se voló de noche. Los datos iniciales indicaban un rendimiento nominal de los sistemas del vehículo. El sistema de ALHAT para la detección de peligros corrió de buena manera, pero identificó un sitio seguro solo a 0,5 metros (1,6 pies; 0,5 yd) afuera de la límites conservadores establecidos alrededor del centro de la almohadilla de aterrizaje. Después ALHAT navegó el vehículo en modo de ciclo cerrado a lo largo de todo el proceso haciendo que el vehículo tomara control durante la fase del descenso de la trayectoria que el ALHAT ya había revisado. Tuvo menos límites de errores conservadores de posicionamiento permitidos por el ALHAT para continuar la navegación y el aterrizaje. El vehículo podría aterrizar con seguridad en la almohadilla.
Un equipo superó los problemas antes de vuelo incluyendo una ignición fallida a causa de una temperatura no-crítica que excedía los límites, la cual fue corregida con éxito durante el segundo intento.[32]
El 19 de noviembre de 2014, se probó el aterrizado Morpheus en el Centro espacial John F. Kennedy. El hardware de ALHAT había sido mejorado con nuevas ópticas que permitían a la Navegación Dopple Lidar medir con precisión la velocidad relativa del vehículo con respecto al suelo.[37] La prueba fue abortada a partir de problemas con el sistema de control remoto. Hasta este momento el total de la quema del motor era de 1,134 segundos.[99] La prueba de ataduras 36 (TT36) en el SLF del KSC SLF el 2 de diciembre de 2014 fue una prueba de regresión. El vehículo Bravo siguió la trayectoria planeada por 40 segundo sin problemas, aunque se pudieron identificar varias discrepancias. Los datos fueron revisados para reconocer las anomalía y asegurar que el vehículo y los sistemas terrestres pudría soportar la prueba de vuelo libre.[100]
El 15 de diciembre de 2014, un prototipo de aterrizador voló arriba de 800 pies de la frontera norte de las Instalaciones de Aterrizaje Shuttle en el Centro Espacial John F. Kennedy en Florida en la prueba de vuelo libre n.º 15. Durante la prueba de 97 segundos ALHAT supervisó el campo de peligros en busca de un lugar seguro para el aterrizaje, y después guio al aterrizador hacia delante y abajo a un aterrizaje exitoso.[101]
- Actual
Para febrero de 2015, las pruebas planeadas han sido completadas. El aterrizador fue llevado de vuelta al Centro Espacial Lyndon B. Johnson.[12][102] La revisión del proyecto, incluyendo las pruebas fue hecha el 12 de marzo de 2015.[10]
Equipo de prueba y operaciones terrestres
[editar]Además de las herramientas de ingeniería normal, diversos artículos de equipos de prueba fueron hechos y usados. Estos incluyen grúas envueltas en blindaje aprueba de calor y escombros : p. 2 , una atadura, un control de ataduras : p. 7 y un amortiguador de energía. El amortiguador de energía era un tubo de metal relleno de un nido de abeja de aluminio a prueba de fuego.[35]: p. 3
El lanzamiento de concreto y las almohadillas de aterrizaje fueron construidas. En el Centro espacial John F. Kennedy Space una pequeña trinchera de llamas para lanzamientos desde la tierra fue cavada cerca del campo de peligros (construido para probar el ALHAT). Se instalaron cámaras y equipo de grabación. Se usó equipo de computo y comunicación por radio.[35]
Se usaron carros para mover el aterrizador, baterías y consumibles. Ropa de seguridad y protección ocular para los láser de categoría IV eran necesarios.[53][103]
En un día típico de pruebas, el equipo de las operaciones terrestres trabajaba por 10 horas desde el inicio y hasta que Morpheus estaba de regreso en el hangar. Las diferentes porciones del día son: Charla de seguridad y desplazamiento de vehículo, revisión antes de la carga de combustible, relleno de los propulsores (oxígeno líquido y metano líquido), revisión de fugas, preparación final, vuelo, y pos-prueba. Las actividades eran divididas entre el equipo de rebote y el centro de control. Además de las baterías eléctricas del aterrizador para la potencia terrestre, las grúas, las células de carga y los tanques de propulsores necesitan ser desplazaos a los soportes de lanzamiento.[53]
Colaboraciones
[editar]El Centro Espacial Lyndon B. Johnson de la NASA colaboró con diversas firmas, instalaciones académicas y otros centros de la NASA mientras construía y probaba los prototipos Alpha y Bravo de los aterrizadores Morpheus.
"Para Morpheus y ALHAT, el Centro Espacial Lyndon B. Johnson tiene asociaciones con el Centro espacial John F. Kennedy para pruebas de vuelo; El Centro espacial Stennis para pruebas motor; el Centro Marshall de vuelos espaciales para el desarrollo del motor y especialistas en aterrizadores; el Centro espacial Goddard para el desarrollo de software de núcleo de vuelo; y el Langley Research Center y el Laboratorio de Propulsión a Chorro para el desarrollo del ALHAT. Las asociaciones comerciales con empresas como Jacobs Engineering, Armadillo Aerospace, Draper Labs, y otros han aumentado el desarrollo y operaciones de muchos aspectos del proyecto."[104]
Problemas de salud y seguridad
[editar]Aunque los bio-propulsores con combinación oxígeno líquido/metano líquido son considerablemente más fáciles y seguros de manejar que la hidrazina, los propulsores pueden prender fuego y los tanques de combustible criogénico pueden explotar.[103][105]
Incidentes
[editar]
- El 1 de junio de 2011, una prueba del aterrizador Morpheus causó un gran fuego en el pasto de las instalaciones del Centro Espacial Lyndon B. Johnson. Fue un incidente menor; nadie acabó herido y el aterrizador estuvo bien.[106] Después del incidente, una trinchera amplia contra fuego de 10 pies (3 m) fue cavada alrededor del área de prueba, para prevenir que se esparcieran posibles fuegos en el pasto.[107]
- El 9 de agosto de 2012, el aterrizador se tropezó, cayendo, prendiendo fuego y explotando dos veces durante el vuelo libre inicial en el Centro espacial John F. Kennedy.[105] El fuego fue extinguido después de que los tanques explotaran. Nadie salió herido, pero el vehículo no estaba en una condición recuperable.[7] Después del accidente se hicieron alrededor de 70 diferentes mejoras al diseño del vehículo y los sistemas terrestres incluyendo instrumentación redundante y mitigando el ambiente vibro-acústico del lanzamiento.[19] Cables conectores de grado militad y acopladores de bus fueron ajustados a los vehículos de reemplazo permitiendo la creación de una trinchera de llamas en las almohadillas de lanzamiento para reducir la vibración.[55] Un artículo, como parte de un reporte de investigación, fue publicado en el Instituto Americano de Aeronáuticas y Astronáuticas: conferencia SPACE 2013.[108]
Notas
[editar]El metano es un propulsor respetuoso con el medio ambiente (i.e. no-tóxico) que la NASA espera reducirá los costos de transportación al hacerse in-situ (ISRU). Por ejemplo, la reacción de Sabatier podría ser usada para convertir dióxido de carbono (CO2) encontrado en la atmósfera de Marte en metano usando hidrógeno usado o transportado como un catalizador y un recurso de calor. El hidrógeno puede estar hecho del agua del hielo que ocurre tanto en la Luna de la tierra como en Marte.[2]
Referencias
[editar]- ↑ a b c d e f g h i j k «Morpheus Lander Website». NASA. Archivado desde el original el 11 de agosto de 2012. Consultado el 25 de octubre de 2011.
- ↑ a b c «Innovative Partnership Tests Fuels of the Future». NASA. 13 de octubre de 2009. Archivado desde el original el 17 de septiembre de 2011. Consultado el 3 de marzo de 2012.
- ↑ a b c d «Equipped with New Sensors, Morpheus Preps to Tackle Landing on its Own». NASA website. NASA. Consultado el 24 de abril de 2014.
- ↑ a b c d e Dean, James (2 de agosto de 2012). «Morpheus lander prototype ready for KSC tests». Florida Today. Archivado desde el original el 8 de diciembre de 2015. Consultado el 2 de agosto de 2012.
- ↑ a b c d «Morpheus Lander Twitter postings on January 21, 2014 (reply)». Twitter - Morpheus Lander. NASA. Consultado el 21 de enero de 2014.
- ↑ Thom Patterson (19 de mayo de 2014). «A father-son chat leads to first-of-its-kind NASA spacecraft». CNN. Consultado el 19 de mayo de 2014.
- ↑ a b c d e f g Moskowitz, Clara (14 de septiembre de 2012). «NASA pushes ahead with new prototype of Moon lander». Space.com. Consultado el 19 de septiembre de 2012.
- ↑ «NASA Advisory Council briefing by Advanced Exploration Systems on November 15, 2012». NASA. Consultado el 5 de febrero de 2013.
- ↑ a b c Dean, James (10 de diciembre de 2013). «Prototype Morpheus lander completes test flight at KSC». Florida Today. Consultado el 12 de diciembre de 2013.
- ↑ a b c d Chris Bergin (14 de marzo de 2015). «NASA dreams of future Morpheus project templates». NASA Spaceflight.com. NASA. Consultado el 22 de marzo de 2015.
- ↑ Hart, Jeremy J., Devolites, Jennifer L. (10 de septiembre de 2013). «The Tailoring of Traditional Systems Engineering for the Morpheus Project». Conference Paper JSC-CN-29415. NASA. Consultado el 18 de abril de 2014.
- ↑ a b James Dean (22 de febrero de 2015). «SpaceX nearing commercial satellite launch». Florida Today (Gannett Company). Consultado el 22 de febrero de 2015.
- ↑ Brandi Dean. «Project Morpheus Begins to Take Flight at NASA’s Johnson Space Center, update dated 2nd May 2011». by NASA on its NASA.GOV website. Archivado desde el original el 12 de junio de 2012. Consultado el 20 de abril de 2015.
- ↑ Boyle, Alan (1 de julio de 2011). «Inside NASA's 'Skunk Works' lab». MSNBC. Archivado desde el original el 5 de julio de 2011. Consultado el 16 de julio de 2011. «Project Morpheus started out as "Project M", a concept that called for landing a humanoid robot on the Moon in 1,000 days. Then reality set in, and the project was redefined.»
- ↑ Young, Kelly (13 de octubre de 2006). «Mock lunar landers to go head-to-head in X Prize Cup». New Scientist. Consultado el 28 de junio de 2012.
- ↑ «The Project Morpheus Lander JSC2011-E-032040 (14 April 2011)». NASA. Archivado desde el original el 15 de marzo de 2019. Consultado el 8 de mayo de 2013.
- ↑ a b «YouTube video from NASAExplorerSchools1 called "NASA Now Minute: Forces and Motion: Project Morpheus" released Feb 27, 2012». NASA and YouTube.
- ↑ a b c d e f Robert L. Morehead, John C. Melcher (28 de julio de 2014). «Combustion Stability Characteristics of the Project Morpheus Liquid Oxygen / Liquid Methane Main Engine». Conference Paper from AIAA/ASME/SAE/ASEE Joint Propulsion Conference; 50th; 28-30 Jul. 2014; Cleveland, OH; United States. Consultado el 29 de septiembre de 2014.
- ↑ a b c d e f g h «And So We Begin Again». NASA. Archivado desde el original el 8 de mayo de 2013. Consultado el 8 de mayo de 2013.
- ↑ Keith Cowing (20 de abril de 2011). «Morpheus Lander: Cool Stuff That JSC PAO Won't Let You See - plus the MBaine comments».
- ↑ «2011 NASA Range Safety Annual Report». NASA. Archivado desde el original el 17 de septiembre de 2012. Consultado el 4 de noviembre de 2012.
- ↑ «NASA Invites Media to View the Morpheus Lander at Kennedy». MEDIA ADVISORY : M12-141. NASA. Consultado el 30 de julio de 2012.
- ↑ Project Morpheus: Blog. «Moving Forward, Not Starting Over». NASA. Consultado el 12 de agosto de 2012.
- ↑ a b c d e f g «Hard at Work - February 2013». Project Morpheus : Blog. NASA - Project Morpheus. Consultado el 8 de febrero de 2013.
- ↑ a b c «Project Morpheus Tether Test 30». YouTube. NASA. Consultado el 30 de agosto de 2013.
- ↑ a b c d «Project Morpheus Tether Test 24». YouTube. NASA. Consultado el 14 de junio de 2013.
- ↑ a b «Project Morpheus Tether Test 25». YouTube. NASA. Consultado el 12 de julio de 2013.
- ↑ a b c «Morpheus Lander Twitter postings on September 24 to 26, 2012». Twitter - Morpheus Lander. NASA. Consultado el 26 de septiembre de 2013.
- ↑ «On the road today. Looking forward to flying free in Florida! Don't worry, there will be a cover for the road trip!». Twitter. NASA. Consultado el 21 de noviembre de 2013.
- ↑ a b «Project Morpheus Lander Arrives at Kennedy for Testing». NASA. Consultado el 3 de diciembre de 2013.
- ↑ a b «Morpheus FreeFlight 9». YouTube - Morpheus Lander. NASA. Consultado el 12 de marzo de 2014.
- ↑ a b «Project Morpheus Free Flight 14». YouTube - Morpheus Lander. NASA. Consultado el 29 de mayo de 2014.
- ↑ «Lunar CATALYST References». NASA website. NASA. Archivado desde el original el 3 de mayo de 2014. Consultado el 29 de mayo de 2014.
- ↑ Jon B. Olansen, PhD; Stephen R. Munday; Jennifer D. Mitchell. «Project Morpheus: Lessons Learned in Lander Technology Development». AIAA Space 2013 Conference; 10-12 Sept. 2013; San Diego, CA; United States. American Institute of Aeronautics and Astronautics: SPACE 2013. Consultado el 24 de abril de 2014.
- ↑ a b c d e f Devolites, Jennifer, Hart, Jeremy. «Morpheus Vertical Test Bed Flight Testing». 2014 IEEE Aerospace Conference; 1–8 March 2014; Big Sky, MT; United States. Institute of Electrical and Electronics Engineers; New York, NY, United States. Consultado el 19 de mayo de 2014.
- ↑ Lloyd Campbell (11 de julio de 2014). «Project Morpheus: Flying a test bed for future landers». RocketSTEM (Issue #8 (July 2014)) (RocketSTEM Media Foundation, Inc.). Consultado el 12 de julio de 2014.
- ↑ a b Project Morpheus. «Post on November 12, 2014». www.Facebook.com. NASA. Consultado el 26 de noviembre de 2014.
- ↑ a b c d e f «webpage A Visit With Morpheus by Jim Hillhouse, April 14th, 2011». AmericaSpace. Archivado desde el original el 22 de marzo de 2012. Consultado el 20 de abril de 2015.
- ↑ a b c «Project Morpheus Facebook information page».
- ↑ a b c d «Autonomous Landing and Hazard Avoidance Technology (ALHAT)». NASA. Consultado el 20 de noviembre de 2012.
- ↑ a b «Hazard Detection Software for Lunar Landing». Tech Brief. NASA. Consultado el 2 de julio de 2013.
- ↑ Eric Berger (17 de junio de 2013). «After failure, NASA mission flies again». Houston Chronicle. Consultado el 17 de junio de 2013.
- ↑ a b Eric Hurlbert; John Patrick Mcmaname; Josh Sooknanen; Joseph W. Studak. «Advanced Development of a Compact 5 - 15 lbf Lox/Methane Thruster for an Integrated Reaction Control and Main Engine Propulsion System». NASA. Consultado el 24 de julio de 2013.
- ↑ a b c «Project Morpheus Tether Test 25». YouTube. NASA. Consultado el 25 de julio de 2013.
- ↑ a b «Morpheus Lander posts on July 23, 2013». Facebook. NASA. Consultado el 24 de julio de 2013.
- ↑ a b c d e f g h i j k l m n ñ o Jon B. Olansen, PhD; Stephen R. Munday; Jennifer D. Mitchell; Michael Baine, PhD (May 23–25, 2012). «Morpheus: Advancing Technologies for Human Exploration». Global Exploration Conference. GLEX-2012.05.2.4x12761.
- ↑ a b «Project Morpheus Facebook posts on May 16, 2013». NASA. 16 de mayo de 2013. Consultado el 17 de mayo de 2013.
- ↑ «JSC Roundup, April 2011». NASA.
- ↑ «Post on Project Morpheus's Facebook page on August 4, 2011 at about 15:00». NASA and Facebook.
- ↑ «Twitter postings on December 11, 2013». Twitter - Morpheus Lander. NASA. Consultado el 18 de diciembre de 2013.
- ↑ «Post on Project Morpheus Facebook site on August 10, 2012 at about 13:00». Consultado el 10 de agosto de 2012.
- ↑ «Modular Instrumentation System (MIS)». NASA - JSC Engineering. NASA. Archivado desde el original el 5 de marzo de 2015. Consultado el 7 de marzo de 2013.
- ↑ a b c Morpheus Ops Lead, Ian Young (@ICYprop). «A Typical Morpheus Test Day». Morpeus website blog. NASA. Consultado el 24 de abril de 2014.
- ↑ a b «Project Morpheus Tether Test 21». NASA and YouTube. Consultado el 24 de mayo de 2013.
- ↑ a b Keith Cowing (18 de mayo de 2013). «Project Morpheus: Hard Lessons and Lean Engineering». Space Ref. Consultado el 19 de mayo de 2013.
- ↑ a b «Project Morpheus Tether Test 31». YouTube - Project Morpheus. NASA. Consultado el 19 de septiembre de 2013.
- ↑ Hillhouse, Jim. «ALHAT – Getting There Safe, Even In The Dark». AmericaSpace. Consultado el 8 de febrero de 2013.
- ↑ Crain, Timothy P.; Brady, Tye (13 de mayo de 2011). «Morpheus GNC Development and Testing». NASA. Consultado el 22 de febrero de 2013.
- ↑ Sara McNamara; Guy Schauerhammer; Darby Vicker; Kae Boyles. «Aerodynamic Forces and Moments for the Morpheus Lander Using OVERFLOW». NASA. Consultado el 22 de febrero de 2013.
- ↑ «Mission Control Technologies (MCT) Utilized by JSC’s Morpheus Lander Project». NASA. Consultado el 22 de febrero de 2013.
- ↑ «Mission Control Technologies (MCT)». NASA. Archivado desde el original el 21 de febrero de 2013. Consultado el 22 de febrero de 2013.
- ↑ David K. Rutishaus; Chirold D. Epp; Edward A. Robertson. «Free-Flight Terrestrial Rocket Lander Demonstration for NASA's Autonomous Landing and Hazard Avoidance Technology (ALHAT) System». American Institute of Aeronautics and Astronautics. Consultado el 22 de febrero de 2013.
- ↑ Ron Maglothin, Aaron Brogley. «Lean Development with the Morpheus Simulation Software». NASA. Consultado el 22 de febrero de 2013.
- ↑ a b Jon B. Olansen, PhD, Jennifer L. Devolites (5 de enero de 2015). Project Morpheus: Lean Development of a Terrestrial Flight Testbed for Maturing NASA Lander Technologies (JSC-CN-32448 edición). NASA Johnson Space Center, Houston, TX 77058. Consultado el 12 de abril de 2015.
- ↑ «Mission Control Technologies (MCT) Utilized by JSC’s Morpheus Lander Project». NASA. Consultado el 25 de octubre de 2012.
- ↑ Jeremy J. Hart, Jennifer D. Mitchell (March 3–10, 2012). «Morpheus Lander Testing Campaign». IEEE Conference Publications (IEEE). ISBN 978-1-4577-0556-4. ISSN 1095-323X. Consultado el 4 de noviembre de 2012.
- ↑ a b «MorpheusLander Channel webpage on YouTube». NASA and YouTube.
- ↑ «Post on Project Morpheus's Facebook page on May 10, 2012 at 18:56». NASA and Facebook. 10 de mayo de 2012.
- ↑ Enlace para el video de la prueba de ataduras de Morpheus 18, una examen de flotación en el Centro Espacial Lyndon B. Johnson, con los sensores ALHAT encendidos: Prueba de ataduras 18 de Morpheus.
- ↑ Project Morpheus Lander, Blog. «Look Out For Those Rocks». NASA. Consultado el 6 de abril de 2012.
- ↑ «NASA tests Project Morpheus engine». Lagniappe (NASA’s John C. Stennis Space Center) 7 (7): 4. July 2012. Consultado el 30 de julio de 2012.
- ↑ «Project Morpheus Twitter posts on May 16, 2013». NASA. 16 de mayo de 2013. Consultado el 17 de mayo de 2013.
- ↑ «Project Morpheus Tether Test 22». YouTube. NASA. Consultado el 6 de junio de 2013.
- ↑ a b «Project Morpheus Tether Test 23». YouTube. NASA. Consultado el 11 de junio de 2013.
- ↑ «Project Morpheus Facebook posts on and following July 2, 2013». Facebook. NASA. 2 de julio de 2013. Consultado el 12 de julio de 2013.
- ↑ «Morpheus/ALHAT TT27». YouTube. NASA. Consultado el 27 de julio de 2013.
- ↑ «Project Morpheus Tether Test 28». YouTube. NASA. Consultado el 8 de agosto de 2013.
- ↑ «Project Morpheus Tether Test 29». YouTube. NASA. Consultado el 26 de agosto de 2013.
- ↑ «Posts on September 24 and 25, 2013». Facebook - Project Morpheus. NASA. Consultado el 26 de septiembre de 2013.
- ↑ «Repeated ignition of Morpheus LOX/methane engine on October 29, 2013». Facebook - Project Morpheus. NASA. Consultado el 29 de octubre de 2013.
- ↑ «We did mention that it's wet out here after 2 days of rain! Whatever floats your boat!». Twitter. NASA. Consultado el 11 de noviembre de 2013.
- ↑ «Project Morpheus Ground Takeoff and Landing». Facebook - Project Morpheus. NASA. Consultado el 11 de noviembre de 2013.
- ↑ «Morpheus TT33». YouTube - Project Morpheus. NASA. Consultado el 7 de diciembre de 2013.
- ↑ «Morpheus Flies Free in Kennedy Test». NASA - NASAKennedy. NASA. Consultado el 11 de diciembre de 2013.
- ↑ «Morpheus FF03». YouTube - Project Morpheus. NASA. Consultado el 12 de diciembre de 2013.
- ↑ «Project Morpheus Free Flight 04». YouTube - Project Morpheus. NASA. Consultado el 18 de diciembre de 2013.
- ↑ Link to video of Free Flight 04 as seen by the vehicle: Project Morpheus Free Flight 04 - Vehicle View.
- ↑ «Project Morpheus Free Flight 05». YouTube - Project Morpheus. NASA. Consultado el 16 de enero de 2014.
- ↑ «Project Morpheus Free Flight 06». YouTube - Project Morpheus. NASA. Consultado el 21 de enero de 2014.
- ↑ «Project Morpheus Free Flight 07». YouTube - Project Morpheus. NASA. Consultado el 10 de febrero de 2014.
- ↑ «Morpheus Lander RCS (Feb 14, 2014)». Twitter - MorpheusLander. NASA. Consultado el 6 de marzo de 2014.
- ↑ «Pad Crew for the Lander (Mar 3, 2014)». Twitter - MorpheusLander. NASA. Consultado el 6 de marzo de 2014.
- ↑ «Project Morpheus Free Flight 8». YouTube - Project Morpheus. NASA. Consultado el 7 de marzo de 2014.
- ↑ «Morpheus Completes Tethered Flight With Test of Hazard Avoidance System». YouTube - NASAKennedy. Consultado el 28 de marzo de 2014.
- ↑ «Project Morpheus Free Flight 10». YouTube - Morpheus Lander. NASA. Consultado el 4 de abril de 2014.
- ↑ «Morpheus Completes Free Flight Test». YouTube - NASAKennedy. NASA. Consultado el 24 de abril de 2014.
- ↑ «Morpheus Free Flight 12». YouTube - Morpheus lander. NASA. Consultado el 1 de mayo de 2014.
- ↑ «Morpheus Free Flight 13». YouTube - Morpheus lander. NASA. Consultado el 23 de mayo de 2014.
- ↑ Mika McKinnon (26 de noviembre de 2014). «The Latest Morpheus Test Flight Cuts Out Before It Even Begins». space.io9.com. Consultado el 26 de noviembre de 2014.
- ↑ «Morpheus Tether Test 36». YouTube - Morpheus Lander. NASA. Consultado el 4 de diciembre de 2014.
- ↑ «Morpheus Soars in Free Flight 15». www.youtube.com. NASAKennady. Consultado el 16 de diciembre de 2014.
- ↑ Project Morpheus. «Post on November 12, 2014». Facebook. NASA. Consultado el 26 de noviembre de 2014.
- ↑ a b Frank Coleman. «GSFC Cryogenic Safety 2013 WFF Safety Awareness Campaign». NASA. Consultado el 9 de julio de 2013. (enlace roto disponible en Internet Archive; véase el historial, la primera versión y la última).
- ↑ «Project Morpheus - About». Facebook - Project Morpheus. NASA. Consultado el 11 de noviembre de 2013.
- ↑ a b «NASA's Morpheus Lander Crashes During First Free Flight Attempt».
- ↑ «Lunar-lander testing sparks grass fire at Johnson Space Center». KHOU. 1 de junio de 2011. Archivado desde el original el 31 de marzo de 2012.
- ↑ Hosein, Neesha (November 2011). «Grass fire at Johnson Space Center becomes lesson learned». Roundup - Lyndon B. Johnson Space Center: 4. Consultado el 8 de mayo de 2013.
- ↑ Jennifer L. Devolites; Jon B. Olansen, PhD; Stephen R. Munday. «Project Morpheus: Morpheus 1.5A Lander Failure Investigation Results». Conference Paper JSC-CN-29482. AIAA. Consultado el 18 de abril de 2014.
{kind=link}
Enlaces externos
[editar]- Páginal principal del Proyecto Morpheus Archivado el 11 de agosto de 2012 en Wayback Machine.
- Página principal de Tecnología de Aterrizaje Autónomo para Anulación de Peligros (ALHAT)
- Panoramas esféricos detallados del vehículo, área de despegue/aterrizaje y centro de control de lanzamiento. (enlace roto disponible en Internet Archive; véase el historial, la primera versión y la última).
| Control de autoridades |
|
|---|
 Datos: Q3407216
Datos: Q3407216 Multimedia: Morpheus (lander) / Q3407216
Multimedia: Morpheus (lander) / Q3407216