
Transformaciones covariante y contravariante
En física, las transformaciones covariantes y las transformaciones contravariantes son reglas que especifican de qué manera ciertas entidades, como vectores o tensores, se modifican cuando se introduce un cambio de base.
Una transformación covariante se define como aquella que describe la nueva base de vectores como una combinación lineal de los vectores de la antigua base. Por convención, los índices que identifican los vectores de la base se representan con subíndices (índices inferiores), al igual que en el caso de todas las entidades que se transforman de la misma manera.[1]
La inversa de una transformación covariante es una transformación contravariante. Siempre que un vector deba ser invariante ante un cambio de base, es decir, deba representar el mismo objeto geométrico o físico con la misma magnitud y dirección que antes, sus componentes deben transformarse según un criterio contravariante. Por convención, los índices que identifican las componentes de un vector se colocan como superíndices (índices superiores), al igual que en el caso de todas las entidades que se transforman de la misma manera.[1]
La suma de los índices coincidentes por pares de un producto con los mismos índices inferiores y superiores es invariante bajo una transformación.
Consideraciones generales[editar]
Un vector en sí mismo es una cantidad geométrica, en principio, independiente (invariante) con respecto a la base elegida. Un vector v está dado, por ejemplo, en las componentes vi sobre una base dada ei. Sobre otra base, póngase por caso e′j, el mismo vector v tiene diferentes componentes denominadas v′j, y además

Como vector, v debe ser invariante con respecto al sistema de coordenadas elegido e independiente de la base elegida, es decir, su dirección y magnitud en el mundo real deben mostrarse iguales independientemente de la base de vectores considerada. Si se realiza un cambio de base transformando los vectores ei en los vectores de la base e′j, las componentes vi se transforman en las nuevas componentes v′j, que seguirán conservando la longitud y la orientación de los vectores una vez transformados.[2]
La correspondiente transformación de v se denomina regla de transformación contravariante.
-
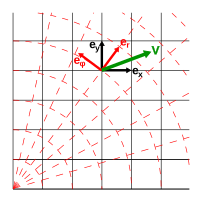 Un vector v, y una base local de vectores tangentes {ex, ey} y {er, eφ}
Un vector v, y una base local de vectores tangentes {ex, ey} y {er, eφ} -
 Representación de v en los dos sistemas de coordenadas
Representación de v en los dos sistemas de coordenadas


En el ejemplo mostrado, un vector se describe mediante dos sistemas de coordenadas diferentes: un sistema de coordenadas rectangular (la cuadrícula negra); y un sistema de coordenadas radial (la cuadrícula roja). Se ha elegido una base de vectores para cada sistema de coordenadas: ex y ey para el sistema de coordenadas rectangular, y er y e φ para el sistema de coordenadas radiales. Los vectores de base radial er y eφ aparecen girados en sentido antihorario con respecto a los vectores de base rectangular ex y ey. La transformación covariante realizada a los vectores base es, por lo tanto, una rotación en sentido antihorario, que gira desde el primer vector de la base al segundo vector de la base.

Las coordenadas de v deben transformarse al nuevo sistema de coordenadas, pero el propio vector v, como objeto matemático, permanece independiente de la base elegida, pareciendo apuntar en la misma dirección y con la misma magnitud, invariante al cambio de coordenadas. La transformación contravariante asegura esta propiedad, compensando la rotación entre las dos bases.[3] Si se observa v desde el contexto del sistema de coordenadas radiales, parece estar más girado en el sentido de las agujas del reloj respecto a los vectores de la base formada por er y eφ cuando se compara con la manera en que aparece en relación con los vectores de la base rectangular formada por ex y ey. Por lo tanto, la necesaria transformación contravariante de v en este ejemplo implica una rotación virtual en el sentido de las agujas del reloj.
Ejemplos de transformación covariante[editar]
La derivada de una función se transforma covariantemente[editar]
La forma explícita de una transformación covariante se introduce mejor con las propiedades de transformación de la derivada de una función. Considérese una función escalar f (como la temperatura en una ubicación en un espacio) definida en un conjunto de puntos p, identificables en un sistema de coordenadas dado (dicha colección se llama variedad). Si se adopta un nuevo sistema de coordenadas , entonces para cada i, la coordenada original se puede expresar como una función de las nuevas coordenadas, de manera que , y se puede expresar la derivada de f referida a las coordenadas antiguas en términos de las nuevas coordenadas, utilizando la regla de la cadena de la derivada, de lo que resulta





Esta es la forma explícita de la regla de la transformación covariante.[4] La notación de una derivada normal con respecto a las coordenadas a veces utiliza una coma, como figura a continuación:

donde el índice i se coloca como subíndice, debido a la transformación covariante.
Los vectores de una base se transforman covariantemente[editar]
Un vector se puede expresar en términos de los vectores de la base que se elija. Para un determinado sistema de coordenadas, se pueden elegir los vectores tangentes a la cuadrícula de coordenadas. Esta base se llama base de coordenadas.
Para ilustrar las propiedades de la transformación, considérese nuevamente el conjunto de puntos p, identificables en un sistema de coordenadas dado , donde (es una variedad). Una función escalar f, que asigna un número real a cada punto p en este espacio, es función de las coordenadas . Una curva c es una colección de puntos dependientes de un solo parámetro, como por ejemplo en el caso de c(λ), donde el parámetro λ define la curva.



Un vector v tangente a la curva es la derivada de la curva, con la derivada tomada en el punto p considerado. Teniendo en cuenta que se puede ver el vector tangente v como un operador (la derivada direccional) que se puede aplicar a una función, entonces

![{\displaystyle \mathbf {v} [f]\ {\stackrel {\mathrm {def} }{=}}\ {\frac {df}{d\lambda }}={\frac {d\;\;}{d\lambda }}f(c(\lambda ))}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7b9e808398a68163d26ec2d741b4c7cb0bd1cbeb)
El paralelo entre el vector tangente y el operador también se puede calcular en las coordenadas
![{\displaystyle \mathbf {v} [f]={\frac {dx^{i}}{d\lambda }}{\frac {\partial f}{\partial x^{i}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fd7b922149b5cfd0c678502d086c52beb63ecb1d)
o en términos de operadores


donde se ha escrito , los vectores tangentes a las curvas que son simplemente la propia cuadrícula de coordenadas.

Si se adopta un nuevo sistema de coordenadas , entonces para cada i, la antigua coordenada se puede expresar como función del nuevo sistema, por lo que Sea la base, los vectores tangentes en este nuevo sistema de coordenadas. Se puede expresar en el nuevo sistema aplicando la regla de la cadena en x. En función de las coordenadas se obtiene la siguiente transformación





que de hecho es lo mismo que la transformación covariante para la derivada de una función.[5]
Transformación contravariante[editar]
Las componentes de un vector (tangente) se transforman de una manera diferente, llamada transformación contravariante. Considérese un vector tangente v y denomínese a sus componentes sobre una base . Por otra parte, son las componentes de , por lo que




donde

Si se expresan las nuevas componentes en función de las antiguas, entonces

Esta es la forma explícita de una transformación llamada transformación contravariante y se observa que es diferente y justamente la inversa de la regla covariante. Para distinguirlos de los vectores covariantes (tangentes), el índice se coloca en la parte superior.[6]
Las formas diferenciales se transforman contravariantemente[editar]
Un ejemplo de transformación contravariante lo da la forma diferencial df. Dada f como una función de las coordenadas , df se puede expresar en términos de . Los diferenciales dx se transforman según la regla contravariante,[7] ya que


Propiedades duales[editar]
Las entidades que se transforman covariantemente (como los vectores de las bases) y las que se transforman contravariantemente (como las componentes de un vector y las formas diferenciales) son casi iguales y, sin embargo, son diferentes. Tienen propiedades duales. Lo que hay detrás de estas propiedades se conoce matemáticamente como espacio dual, y siempre va aparejado a un espacio vectorial lineal determinado.[8]
Tómese cualquier espacio vectorial T. Una función f en T se llama lineal si, para cualquier par de vectores v y w, y para cualquier escalar α:

Un ejemplo sencillo es la función que asigna a un vector el valor de una de sus componentes (llamada función de proyección). Tiene un vector como argumento y asigna un número real, el valor de una componente.
Todas estas funciones lineales de valores escalares juntas forman un espacio vectorial, llamado 'espacio dual de T. La suma f+g es nuevamente una función lineal cuando f y g son lineales, y lo mismo se aplica a la multiplicación escalar αf.
Dada una base para T, se puede definir una base, llamada base dual para el espacio dual de forma natural tomando el conjunto de funciones lineales mencionadas anteriormente: las funciones de proyección. Cada función de proyección (indexada por ω) produce el número 1 cuando se aplica a uno de los vectores de una base . Por ejemplo, da un 1 en y cero en otros lugares. Aplicando esta función lineal a un vector , se obtiene (usando su linealidad)





que es el valor de la primera coordenada. Por este motivo, se denomina función de proyección.[9]
Hay tantos vectores de la base dual como vectores de la base , por lo que el espacio dual tiene la misma dimensión que el propio espacio lineal. Es casi el mismo espacio, excepto porque los elementos del espacio dual (llamados vectores) se transforman covariantemente y los elementos del espacio vectorial tangente se transforman de manera contravariante.

A veces se introduce una notación adicional, en la que el valor real de una función lineal σ en un vector tangente u se da como
![{\displaystyle \sigma [\mathbf {u} ]:=\langle \sigma ,\mathbf {u} \rangle }](https://wikimedia.org/api/rest_v1/media/math/render/svg/f19c896b644346ac7a50a246c76519e688769087)
donde es un número real. Esta notación enfatiza el carácter bilineal de la forma. Es lineal en σ ya que es una función lineal; y es lineal en u, ya que es un elemento de un espacio vectorial.

Componentes tensoriales covariantes y contravariantes[editar]
Sin coordenadas[editar]
Un tensor del tipo (r, s) se puede definir como una función multilineal de valor real de r vectores duales y de s vectores. Dado que los vectores y los vectores duales pueden definirse sin depender de un sistema de coordenadas, un tensor definido de esta manera es independiente de la elección de un sistema de coordenadas.[10]
La notación de un tensor es

para vectores duales (formas diferenciales) ρ, σ; y vectores tangentes . En la segunda notación la distinción entre vectores y formas diferenciales es más obvia.

Con coordenadas[editar]
Debido a que un tensor depende linealmente de sus argumentos, está completamente determinado si se conocen los valores sobre la base y .



Los números se denominan componentes del tensor según la base elegida.[11]

Si se elige otra base (que es una combinación lineal de la base original), se pueden usar las propiedades lineales del tensor, y se encuentra que los componentes del tensor en los índices superiores se transforman como vectores duales (y por lo tanto, contravariantes), mientras que los índices inferiores se transformarán como la base de vectores tangentes y, por lo tanto, son covariantes. Para un tensor de rango 2, se puede verificar que
- tensor covariante
- tensor contravariante


Para un tensor mixto covariante y contravariante de rango 2
- tensor mixto covariante y contravariante

Véase también[editar]
Referencias[editar]
- ↑ a b Tulsi Dass, S.K. Sharma (1998). Mathematical Methods In Classical And Quantum Physics. Universities Press. pp. 139 de 703. ISBN 9788173710896. Consultado el 16 de mayo de 2024.
- ↑ J. Michael Finn (2009). Classical Mechanics. Jones & Bartlett Publishers. pp. 64 de 576. ISBN 9780763779603. Consultado el 16 de mayo de 2024.
- ↑ Bennie Marsh & Frankie Murray (2018). Linear Algebra and Analytic Geometry. Scientific e-Resources. pp. 172 de 296. ISBN 9781839473180. Consultado el 16 de mayo de 2024.
- ↑ Ruben Aldrovandi, Jose G Pereira (2012). Teleparallel Gravity: An Introduction. Springer Science & Business Media. pp. 44 de 214. ISBN 9789400751439. Consultado el 16 de mayo de 2024.
- ↑ Karl Svozil (2020). Mathematical Methods Of Theoretical Physics. World Scientific. pp. 89 de 332. ISBN 9789811208423. Consultado el 16 de mayo de 2024.
- ↑ Mikhail Itskov (2009). Tensor Algebra and Tensor Analysis for Engineers: With Applications to Continuum Mechanics. Springer Science & Business Media. pp. 41 de 247. ISBN 9783540939078. Consultado el 16 de mayo de 2024.
- ↑ Differential Forms in Mathematical Physics: Differential Forms in Mathematical Physics. Elsevier. 2009. pp. 337 de 484. ISBN 9780080875248. Consultado el 16 de mayo de 2024.
- ↑ J. J. Stoker (1989). Differential Geometry. John Wiley & Sons. pp. 377 de 432. ISBN 9780471504030. Consultado el 16 de mayo de 2024.
- ↑ Recent Trends in Algebraic Development Techniques: 14th International Workshop, WADT '99, Chateau de Bonas, September 15-18, 1999 Selected Papers. Springer. 2004. pp. 130 de 490. ISBN 9783540446163. Consultado el 16 de mayo de 2024.
- ↑ Sadri Hassani (2002). Mathematical Physics: A Modern Introduction to Its Foundations. Springer Science & Business Media. pp. 731 de 1026. ISBN 9780387985794. Consultado el 16 de mayo de 2024.
- ↑ Edgardo O. Taroco, Pablo J. Blanco, Raúl A. Feijóo (2020). Introduction to the Variational Formulation in Mechanics: Fundamentals and Applications. John Wiley & Sons. pp. 11 de 608. ISBN 9781119600909. Consultado el 16 de mayo de 2024.
| Control de autoridades |
|
|---|
 Datos: Q362640
Datos: Q362640